 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvaluation of a Smart Mobile Robotic System for Industrial Plant Inspection and Supervision
Feb 12, 2024



Automated and autonomous industrial inspection is a longstanding research field, driven by the necessity to enhance safety and efficiency within industrial settings. In addressing this need, we introduce an autonomously navigating robotic system designed for comprehensive plant inspection. This innovative system comprises a robotic platform equipped with a diverse array of sensors integrated to facilitate the detection of various process and infrastructure parameters. These sensors encompass optical (LiDAR, Stereo, UV/IR/RGB cameras), olfactory (electronic nose), and acoustic (microphone array) capabilities, enabling the identification of factors such as methane leaks, flow rates, and infrastructural anomalies. The proposed system underwent individual evaluation at a wastewater treatment site within a chemical plant, providing a practical and challenging environment for testing. The evaluation process encompassed key aspects such as object detection, 3D localization, and path planning. Furthermore, specific evaluations were conducted for optical methane leak detection and localization, as well as acoustic assessments focusing on pump equipment and gas leak localization.
A Smart Robotic System for Industrial Plant Supervision
Sep 01, 2023


In today's chemical plants, human field operators perform frequent integrity checks to guarantee high safety standards, and thus are possibly the first to encounter dangerous operating conditions. To alleviate their task, we present a system consisting of an autonomously navigating robot integrated with various sensors and intelligent data processing. It is able to detect methane leaks and estimate its flow rate, detect more general gas anomalies, recognize oil films, localize sound sources and detect failure cases, map the environment in 3D, and navigate autonomously, employing recognition and avoidance of dynamic obstacles. We evaluate our system at a wastewater facility in full working conditions. Our results demonstrate that the system is able to robustly navigate the plant and provide useful information about critical operating conditions.
Two Efficient and Easy-to-Use NLOS Mitigation Solutions to Indoor 3-D AOA-Based Localization
Aug 13, 2021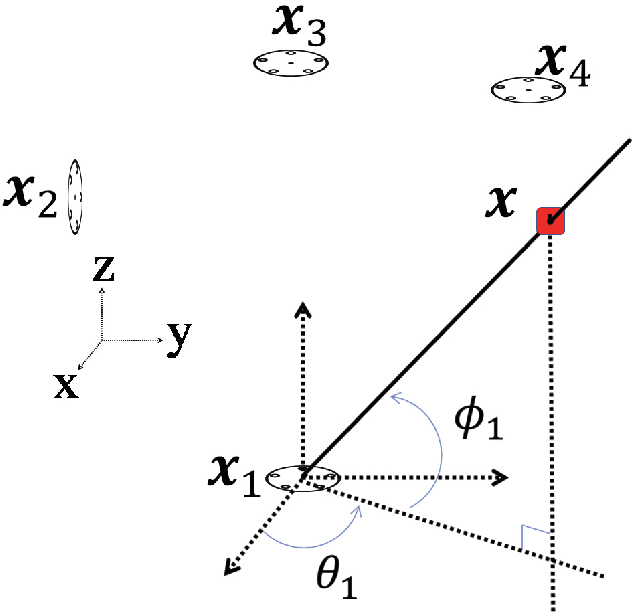
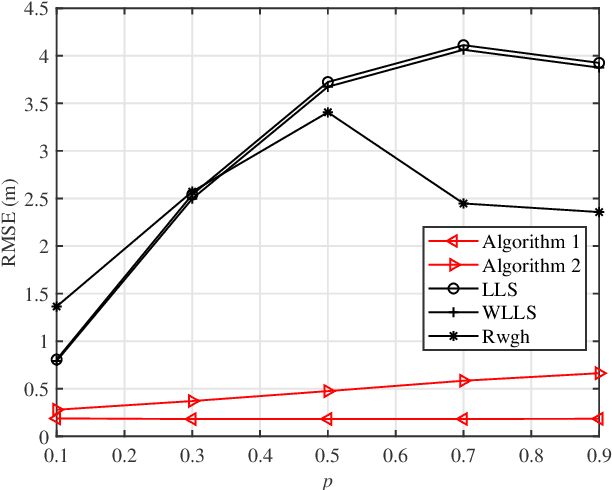
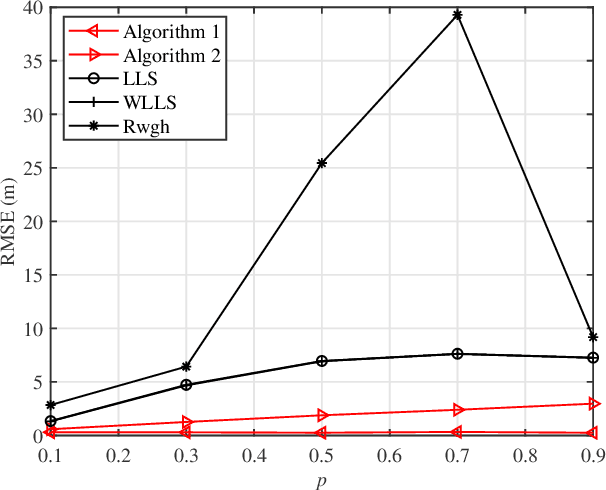
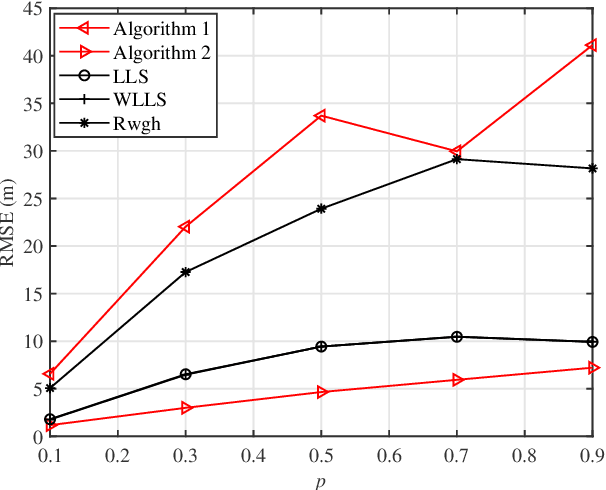
This paper proposes two efficient and easy-to-use error mitigation solutions to the problem of three-dimensional (3-D) angle-of-arrival (AOA) source localization in the mixed line-of-sight (LOS) and non-line-of-sight (NLOS) indoor environments. A weighted linear least squares estimator is derived first for the LOS AOA components in terms of the direction vectors of arrival, albeit in a sub-optimal manner. Next, data selection exploiting the sum of squared residuals is carried out to discard the error-prone NLOS connections. In so doing, the first approach is constituted and more accurate closed-form location estimates can be obtained. The second method applies a simulated annealing stochastic framework to realize the robust $\ell_1$-minimization criterion, which therefore falls into the methodology of statistical robustification. Computer simulations and ultrasonic onsite experiments are conducted to evaluate the performance of the two proposed methods, demonstrating their outstanding positioning results in the respective scenarios.