 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSoft Actor-Critic-based Control Barrier Adaptation for Robust Autonomous Navigation in Unknown Environments
Mar 11, 2025



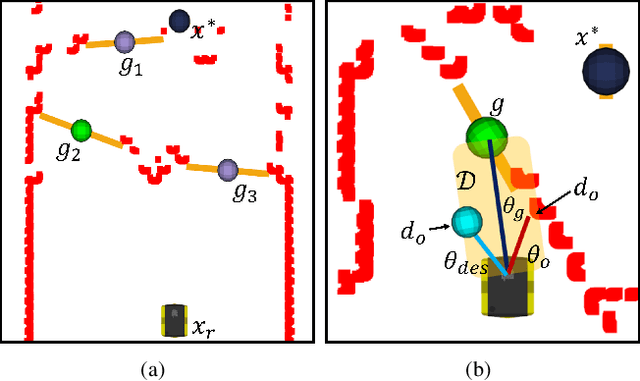
Motion planning failures during autonomous navigation often occur when safety constraints are either too conservative, leading to deadlocks, or too liberal, resulting in collisions. To improve robustness, a robot must dynamically adapt its safety constraints to ensure it reaches its goal while balancing safety and performance measures. To this end, we propose a Soft Actor-Critic (SAC)-based policy for adapting Control Barrier Function (CBF) constraint parameters at runtime, ensuring safe yet non-conservative motion. The proposed approach is designed for a general high-level motion planner, low-level controller, and target system model, and is trained in simulation only. Through extensive simulations and physical experiments, we demonstrate that our framework effectively adapts CBF constraints, enabling the robot to reach its final goal without compromising safety.
A GP-based Robust Motion Planning Framework for Agile Autonomous Robot Navigation and Recovery in Unknown Environments
Feb 02, 2024

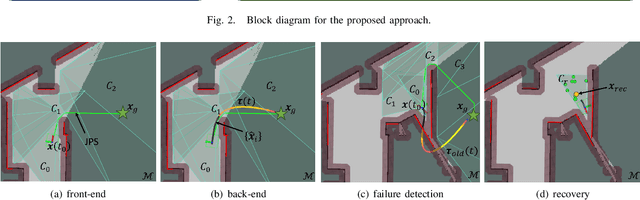

For autonomous mobile robots, uncertainties in the environment and system model can lead to failure in the motion planning pipeline, resulting in potential collisions. In order to achieve a high level of robust autonomy, these robots should be able to proactively predict and recover from such failures. To this end, we propose a Gaussian Process (GP) based model for proactively detecting the risk of future motion planning failure. When this risk exceeds a certain threshold, a recovery behavior is triggered that leverages the same GP model to find a safe state from which the robot may continue towards the goal. The proposed approach is trained in simulation only and can generalize to real world environments on different robotic platforms. Simulations and physical experiments demonstrate that our framework is capable of both predicting planner failures and recovering the robot to states where planner success is likely, all while producing agile motion.
A Model Predictive Path Integral Method for Fast, Proactive, and Uncertainty-Aware UAV Planning in Cluttered Environments
Aug 02, 2023



Current motion planning approaches for autonomous mobile robots often assume that the low level controller of the system is able to track the planned motion with very high accuracy. In practice, however, tracking error can be affected by many factors, and could lead to potential collisions when the robot must traverse a cluttered environment. To address this problem, this paper proposes a novel receding-horizon motion planning approach based on Model Predictive Path Integral (MPPI) control theory -- a flexible sampling-based control technique that requires minimal assumptions on vehicle dynamics and cost functions. This flexibility is leveraged to propose a motion planning framework that also considers a data-informed risk function. Using the MPPI algorithm as a motion planner also reduces the number of samples required by the algorithm, relaxing the hardware requirements for implementation. The proposed approach is validated through trajectory generation for a quadrotor unmanned aerial vehicle (UAV), where fast motion increases trajectory tracking error and can lead to collisions with nearby obstacles. Simulations and hardware experiments demonstrate that the MPPI motion planner proactively adapts to the obstacles that the UAV must negotiate, slowing down when near obstacles and moving quickly when away from obstacles, resulting in a complete reduction of collisions while still producing lively motion.
Autonomous Ground Navigation in Highly Constrained Spaces: Lessons learned from The BARN Challenge at ICRA 2022
Aug 22, 2022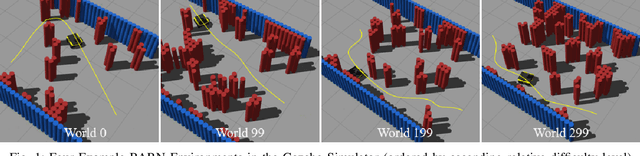
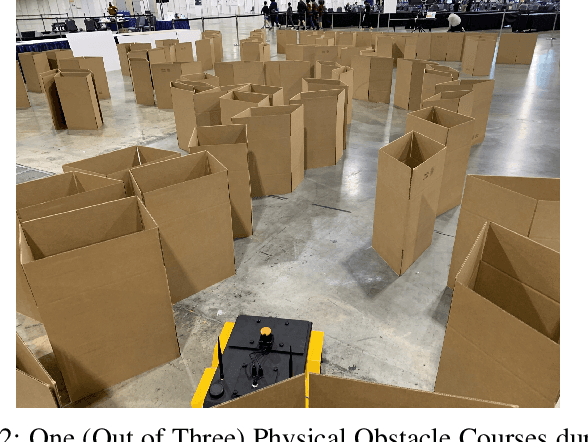
The BARN (Benchmark Autonomous Robot Navigation) Challenge took place at the 2022 IEEE International Conference on Robotics and Automation (ICRA 2022) in Philadelphia, PA. The aim of the challenge was to evaluate state-of-the-art autonomous ground navigation systems for moving robots through highly constrained environments in a safe and efficient manner. Specifically, the task was to navigate a standardized, differential-drive ground robot from a predefined start location to a goal location as quickly as possible without colliding with any obstacles, both in simulation and in the real world. Five teams from all over the world participated in the qualifying simulation competition, three of which were invited to compete with each other at a set of physical obstacle courses at the conference center in Philadelphia. The competition results suggest that autonomous ground navigation in highly constrained spaces, despite seeming ostensibly simple even for experienced roboticists, is actually far from being a solved problem. In this article, we discuss the challenge, the approaches used by the top three winning teams, and lessons learned to direct future research.