 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA GP-based Robust Motion Planning Framework for Agile Autonomous Robot Navigation and Recovery in Unknown Environments
Feb 02, 2024

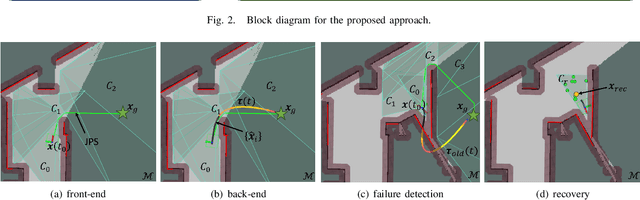

For autonomous mobile robots, uncertainties in the environment and system model can lead to failure in the motion planning pipeline, resulting in potential collisions. In order to achieve a high level of robust autonomy, these robots should be able to proactively predict and recover from such failures. To this end, we propose a Gaussian Process (GP) based model for proactively detecting the risk of future motion planning failure. When this risk exceeds a certain threshold, a recovery behavior is triggered that leverages the same GP model to find a safe state from which the robot may continue towards the goal. The proposed approach is trained in simulation only and can generalize to real world environments on different robotic platforms. Simulations and physical experiments demonstrate that our framework is capable of both predicting planner failures and recovering the robot to states where planner success is likely, all while producing agile motion.
A Model Predictive Path Integral Method for Fast, Proactive, and Uncertainty-Aware UAV Planning in Cluttered Environments
Aug 02, 2023



Current motion planning approaches for autonomous mobile robots often assume that the low level controller of the system is able to track the planned motion with very high accuracy. In practice, however, tracking error can be affected by many factors, and could lead to potential collisions when the robot must traverse a cluttered environment. To address this problem, this paper proposes a novel receding-horizon motion planning approach based on Model Predictive Path Integral (MPPI) control theory -- a flexible sampling-based control technique that requires minimal assumptions on vehicle dynamics and cost functions. This flexibility is leveraged to propose a motion planning framework that also considers a data-informed risk function. Using the MPPI algorithm as a motion planner also reduces the number of samples required by the algorithm, relaxing the hardware requirements for implementation. The proposed approach is validated through trajectory generation for a quadrotor unmanned aerial vehicle (UAV), where fast motion increases trajectory tracking error and can lead to collisions with nearby obstacles. Simulations and hardware experiments demonstrate that the MPPI motion planner proactively adapts to the obstacles that the UAV must negotiate, slowing down when near obstacles and moving quickly when away from obstacles, resulting in a complete reduction of collisions while still producing lively motion.