 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMechanism and Model of a Soft Robot for Head Stabilization in Cancer Radiation Therapy
Mar 11, 2022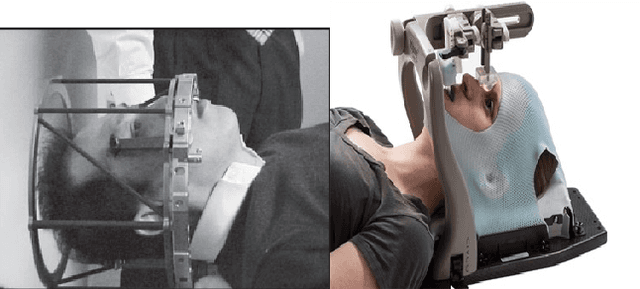
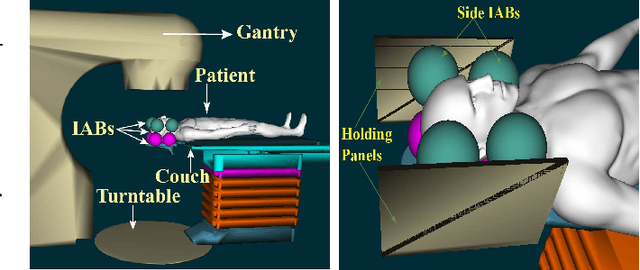
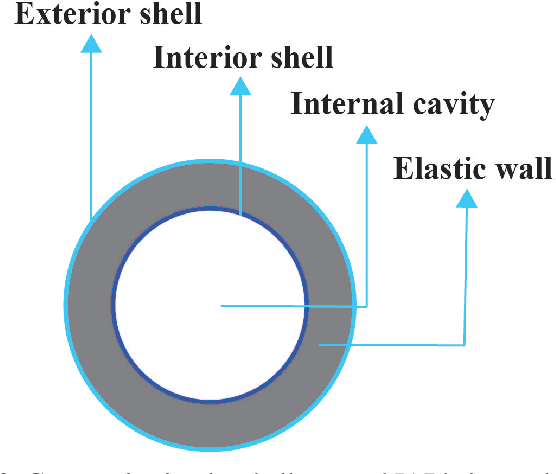
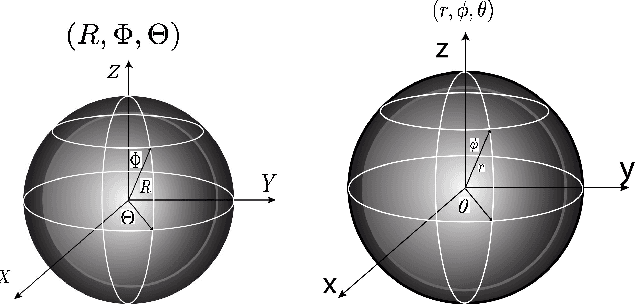
We present a parallel robot mechanism and the constitutive laws that govern the deformation of its constituent soft actuators. Our ultimate goal is the real-time motion-correction of a patient's head deviation from a target pose where the soft actuators control the position of the patient's cranial region on a treatment machine. We describe the mechanism, derive the stress-strain constitutive laws for the individual actuators and the inverse kinematics that prescribes a given deformation, and then present simulation results that validate our mathematical formulation. Our results demonstrate deformations consistent with our radially symmetric displacement formulation under a finite elastic deformation framework.
Minimax Iterative Dynamic Game: Application to Nonlinear Robot Control Tasks
Aug 05, 2018
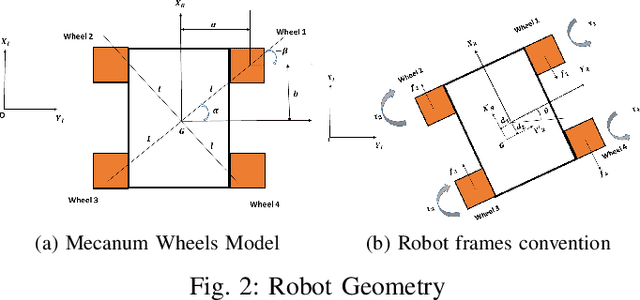
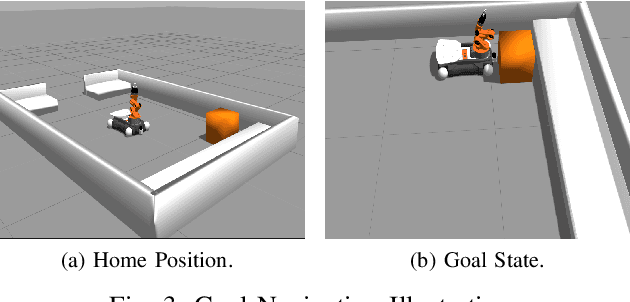
Multistage decision policies provide useful control strategies in high-dimensional state spaces, particularly in complex control tasks. However, they exhibit weak performance guarantees in the presence of disturbance, model mismatch, or model uncertainties. This brittleness limits their use in high-risk scenarios. We present how to quantify the sensitivity of such policies in order to inform of their robustness capacity. We also propose a minimax iterative dynamic game framework for designing robust policies in the presence of disturbance/uncertainties. We test the quantification hypothesis on a carefully designed deep neural network policy; we then pose a minimax iterative dynamic game (iDG) framework for improving policy robustness in the presence of adversarial disturbances. We evaluate our iDG framework on a mecanum-wheeled robot, whose goal is to find a ocally robust optimal multistage policy that achieve a given goal-reaching task. The algorithm is simple and adaptable for designing meta-learning/deep policies that are robust against disturbances, model mismatch, or model uncertainties, up to a disturbance bound. Videos of the results are on the author's website, http://ecs.utdallas.edu/~opo140030/iros18/iros2018.html, while the codes for reproducing our experiments are on github, https://github.com/lakehanne/youbot/tree/rilqg. A self-contained environment for reproducing our results is on docker, https://hub.docker.com/r/lakehanne/youbotbuntu14/
Soft-NeuroAdapt: A 3-DOF Neuro-Adaptive Patient Pose Correction System For Frameless and Maskless Cancer Radiotherapy
Sep 22, 2017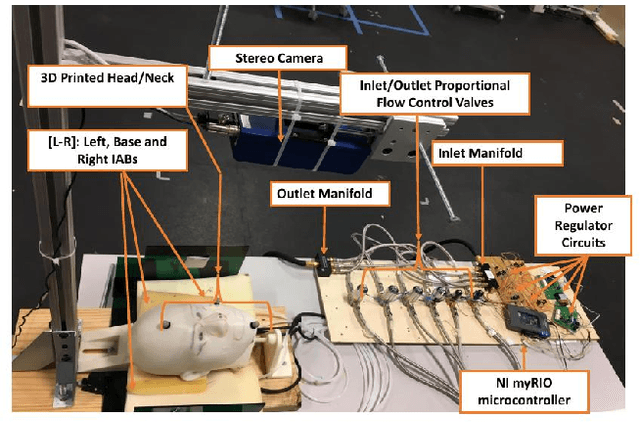
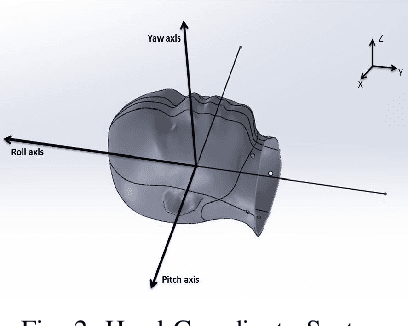
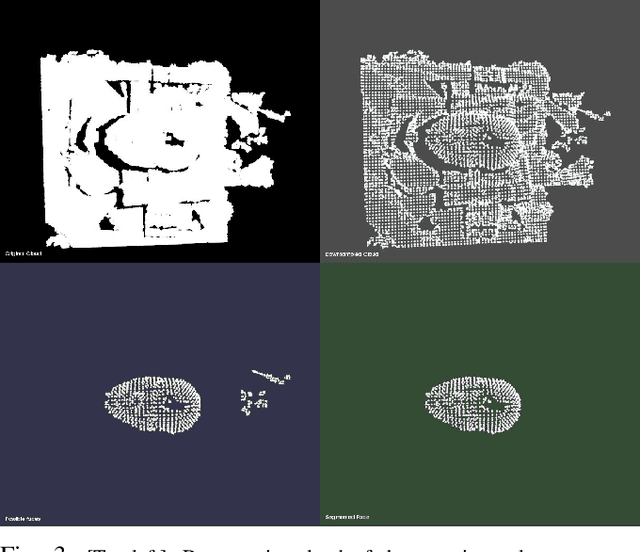

Precise patient positioning is fundamental to successful removal of malignant tumors during treatment of head and neck cancers. Errors in patient positioning have been known to damage critical organs and cause complications. To better address issues of patient positioning and motion, we introduce a 3-DOF neuro-adaptive soft-robot, called Soft-NeuroAdapt to correct deviations along 3 axes. The robot consists of inflatable air bladders that adaptively control head deviations from target while ensuring patient safety and comfort. The adaptive-neuro controller combines a state feedback component, a feedforward regulator, and a neural network that ensures correct adaptation. States are measured by a 3D vision system. We validate Soft-NeuroAdapt on a 3D printed head-and-neck dummy, and demonstrate that the controller provides adaptive actuation that compensates for intrafractional deviations in patient positioning.
Nonlinear Systems Identification Using Deep Dynamic Neural Networks
Oct 05, 2016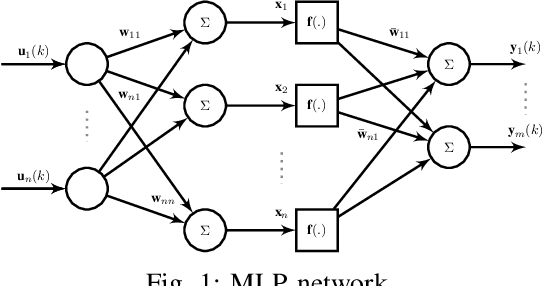
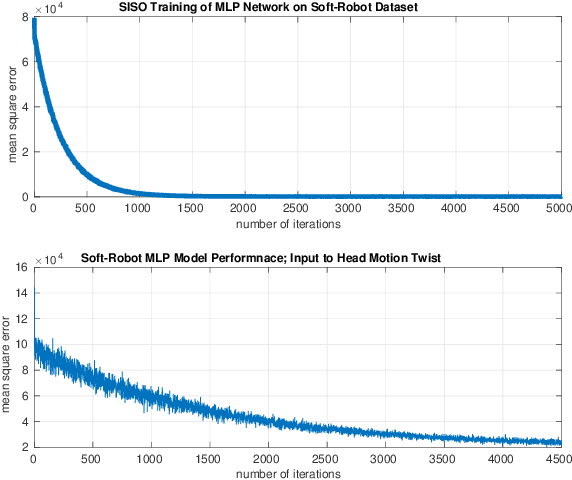

Neural networks are known to be effective function approximators. Recently, deep neural networks have proven to be very effective in pattern recognition, classification tasks and human-level control to model highly nonlinear realworld systems. This paper investigates the effectiveness of deep neural networks in the modeling of dynamical systems with complex behavior. Three deep neural network structures are trained on sequential data, and we investigate the effectiveness of these networks in modeling associated characteristics of the underlying dynamical systems. We carry out similar evaluations on select publicly available system identification datasets. We demonstrate that deep neural networks are effective model estimators from input-output data
A Real-Time Soft Robotic Patient Positioning System for Maskless Head-and-Neck Cancer Radiotherapy: An Initial Investigation
Sep 19, 2015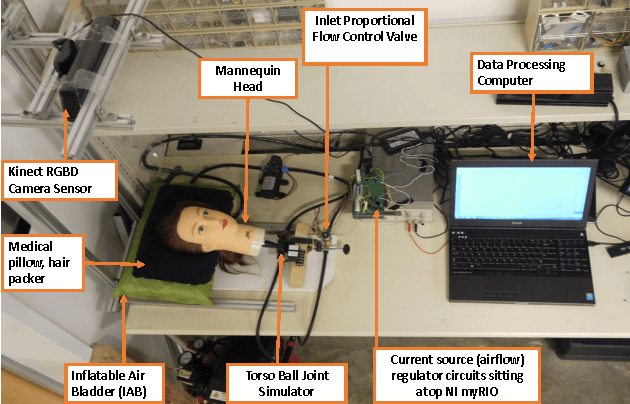

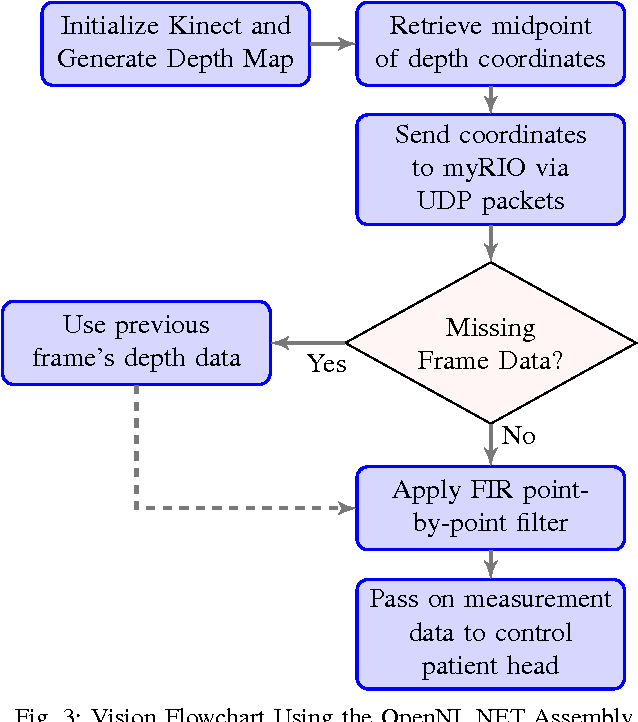
We present an initial examination of a novel approach to accurately position a patient during head and neck intensity modulated radiotherapy (IMRT). Position-based visual-servoing of a radio-transparent soft robot is used to control the flexion/extension cranial motion of a manikin head. A Kinect RGB-D camera is used to measure head position and the error between the sensed and desired position is used to control a pneumatic system which regulates pressure within an inflatable air bladder (IAB). Results show that the system is capable of controlling head motion to within 2mm with respect to a reference trajectory. This establishes proof-of-concept that using multiple IABs and actuators can improve cancer treatment.