Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMechanism and Model of a Soft Robot for Head Stabilization in Cancer Radiation Therapy
Mar 11, 2022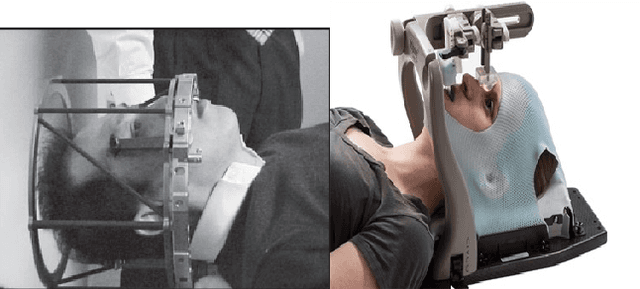
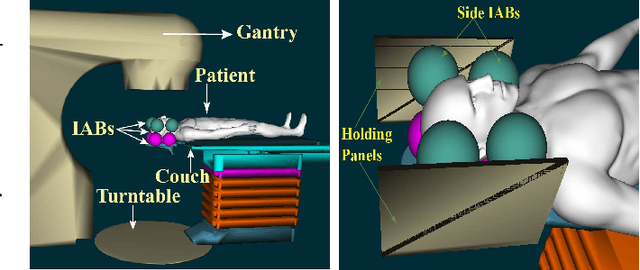
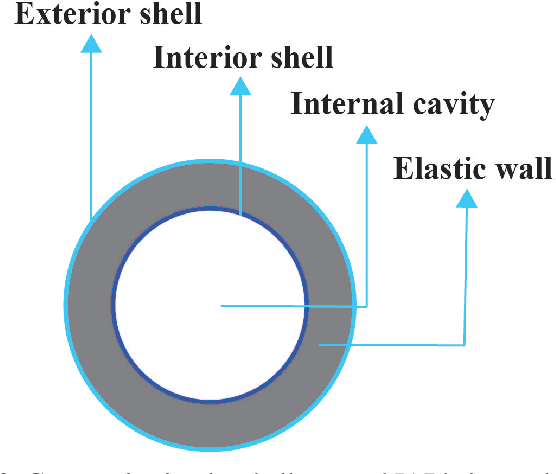
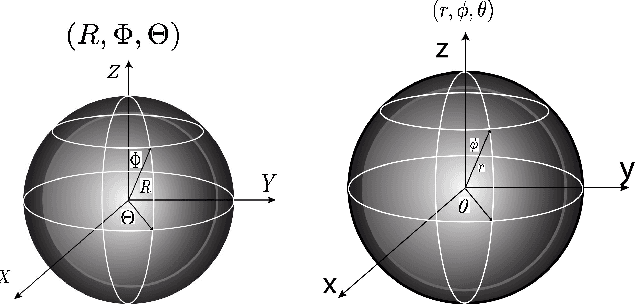
We present a parallel robot mechanism and the constitutive laws that govern the deformation of its constituent soft actuators. Our ultimate goal is the real-time motion-correction of a patient's head deviation from a target pose where the soft actuators control the position of the patient's cranial region on a treatment machine. We describe the mechanism, derive the stress-strain constitutive laws for the individual actuators and the inverse kinematics that prescribes a given deformation, and then present simulation results that validate our mathematical formulation. Our results demonstrate deformations consistent with our radially symmetric displacement formulation under a finite elastic deformation framework.
* In 2020 IEEE International Conference on Robotics and Automation
(ICRA), pp. 4609-4615. IEEE, 2020
Via