 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeScalable Offline Metrics for Autonomous Driving
Oct 09, 2025
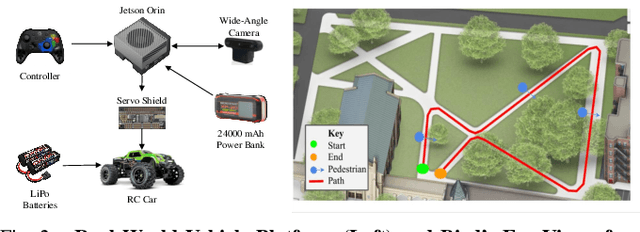
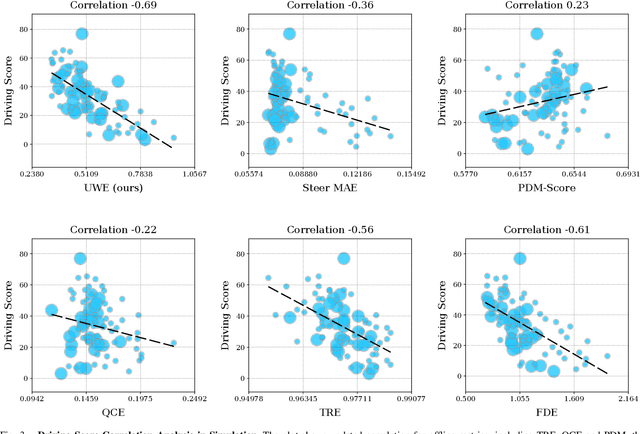
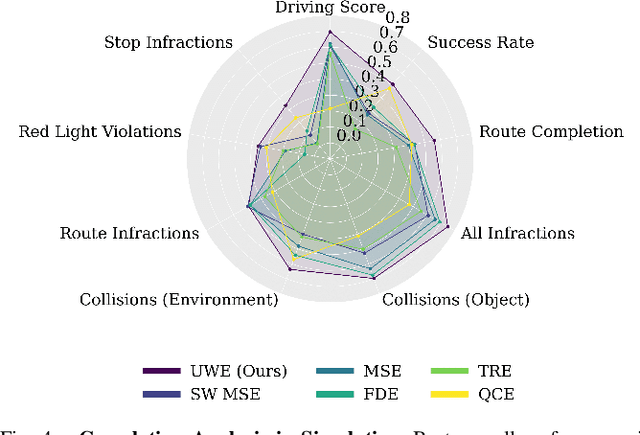
Real-World evaluation of perception-based planning models for robotic systems, such as autonomous vehicles, can be safely and inexpensively conducted offline, i.e., by computing model prediction error over a pre-collected validation dataset with ground-truth annotations. However, extrapolating from offline model performance to online settings remains a challenge. In these settings, seemingly minor errors can compound and result in test-time infractions or collisions. This relationship is understudied, particularly across diverse closed-loop metrics and complex urban maneuvers. In this work, we revisit this undervalued question in policy evaluation through an extensive set of experiments across diverse conditions and metrics. Based on analysis in simulation, we find an even worse correlation between offline and online settings than reported by prior studies, casting doubts on the validity of current evaluation practices and metrics for driving policies. Next, we bridge the gap between offline and online evaluation. We investigate an offline metric based on epistemic uncertainty, which aims to capture events that are likely to cause errors in closed-loop settings. The resulting metric achieves over 13% improvement in correlation compared to previous offline metrics. We further validate the generalization of our findings beyond the simulation environment in real-world settings, where even greater gains are observed.
Soft-NeuroAdapt: A 3-DOF Neuro-Adaptive Patient Pose Correction System For Frameless and Maskless Cancer Radiotherapy
Sep 22, 2017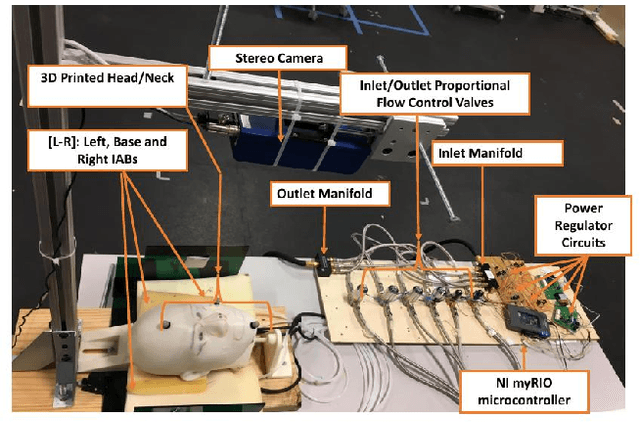
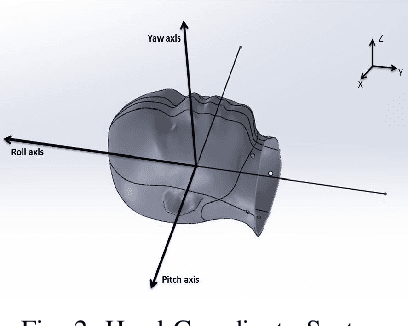
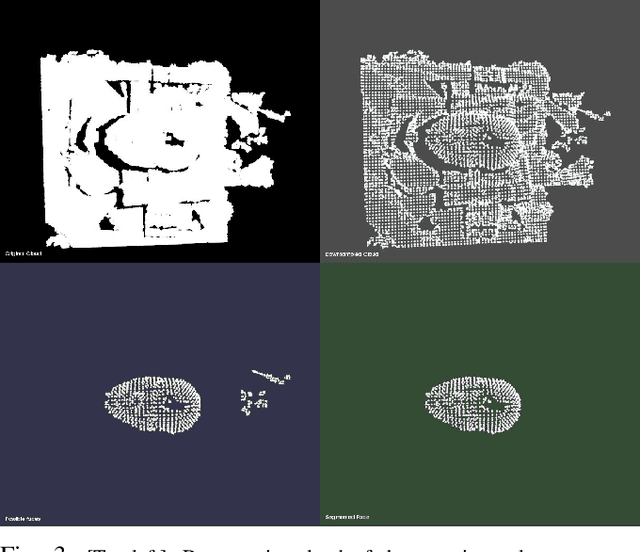

Precise patient positioning is fundamental to successful removal of malignant tumors during treatment of head and neck cancers. Errors in patient positioning have been known to damage critical organs and cause complications. To better address issues of patient positioning and motion, we introduce a 3-DOF neuro-adaptive soft-robot, called Soft-NeuroAdapt to correct deviations along 3 axes. The robot consists of inflatable air bladders that adaptively control head deviations from target while ensuring patient safety and comfort. The adaptive-neuro controller combines a state feedback component, a feedforward regulator, and a neural network that ensures correct adaptation. States are measured by a 3D vision system. We validate Soft-NeuroAdapt on a 3D printed head-and-neck dummy, and demonstrate that the controller provides adaptive actuation that compensates for intrafractional deviations in patient positioning.