 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSea-cret Agents: Maritime Abduction for Region Generation to Expose Dark Vessel Trajectories
Feb 03, 2025Bad actors in the maritime industry engage in illegal behaviors after disabling their vessel's automatic identification system (AIS) - which makes finding such vessels difficult for analysts. Machine learning approaches only succeed in identifying the locations of these ``dark vessels'' in the immediate future. This work leverages ideas from the literature on abductive inference applied to locating adversarial agents to solve the problem. Specifically, we combine concepts from abduction, logic programming, and rule learning to create an efficient method that approaches full recall of dark vessels while requiring less search area than machine learning methods. We provide a logic-based paradigm for reasoning about maritime vessels, an abductive inference query method, an automatically extracted rule-based behavior model methodology, and a thorough suite of experiments.
Metal Price Spike Prediction via a Neurosymbolic Ensemble Approach
Oct 16, 2024



Predicting price spikes in critical metals such as Cobalt, Copper, Magnesium, and Nickel is crucial for mitigating economic risks associated with global trends like the energy transition and reshoring of manufacturing. While traditional models have focused on regression-based approaches, our work introduces a neurosymbolic ensemble framework that integrates multiple neural models with symbolic error detection and correction rules. This framework is designed to enhance predictive accuracy by correcting individual model errors and offering interpretability through rule-based explanations. We show that our method provides up to 6.42% improvement in precision, 29.41% increase in recall at 13.24% increase in F1 over the best performing neural models. Further, our method, as it is based on logical rules, has the benefit of affording an explanation as to which combination of neural models directly contribute to a given prediction.
Diversity Measures: Domain-Independent Proxies for Failure in Language Model Queries
Aug 22, 2023Error prediction in large language models often relies on domain-specific information. In this paper, we present measures for quantification of error in the response of a large language model based on the diversity of responses to a given prompt - hence independent of the underlying application. We describe how three such measures - based on entropy, Gini impurity, and centroid distance - can be employed. We perform a suite of experiments on multiple datasets and temperature settings to demonstrate that these measures strongly correlate with the probability of failure. Additionally, we present empirical results demonstrating how these measures can be applied to few-shot prompting, chain-of-thought reasoning, and error detection.
Recurrent Control Nets for Deep Reinforcement Learning
Jan 18, 2019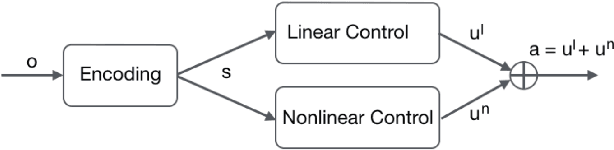
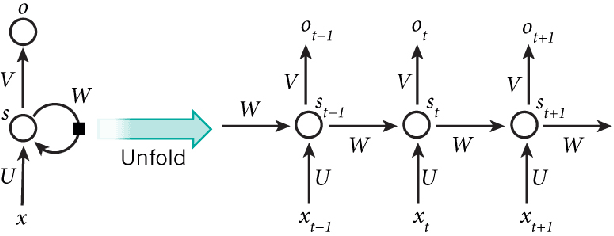
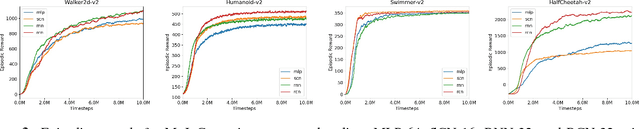
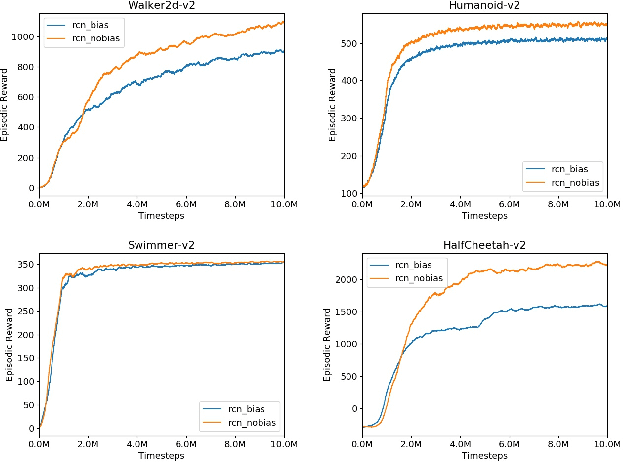
Central Pattern Generators (CPGs) are biological neural circuits capable of producing coordinated rhythmic outputs in the absence of rhythmic input. As a result, they are responsible for most rhythmic motion in living organisms. This rhythmic control is broadly applicable to fields such as locomotive robotics and medical devices. In this paper, we explore the possibility of creating a self-sustaining CPG network for reinforcement learning that learns rhythmic motion more efficiently and across more general environments than the current multilayer perceptron (MLP) baseline models. Recent work introduces the Structured Control Net (SCN), which maintains linear and nonlinear modules for local and global control, respectively. Here, we show that time-sequence architectures such as Recurrent Neural Networks (RNNs) model CPGs effectively. Combining previous work with RNNs and SCNs, we introduce the Recurrent Control Net (RCN), which adds a linear component to the, RCNs match and exceed the performance of baseline MLPs and SCNs across all environment tasks. Our findings confirm existing intuitions for RNNs on reinforcement learning tasks, and demonstrate promise of SCN-like structures in reinforcement learning.