 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAgent TCP/IP: An Agent-to-Agent Transaction System
Jan 08, 2025

Autonomous agents represent an inevitable evolution of the internet. Current agent frameworks do not embed a standard protocol for agent-to-agent interaction, leaving existing agents isolated from their peers. As intellectual property is the native asset ingested by and produced by agents, a true agent economy requires equipping agents with a universal framework for engaging in binding contracts with each other, including the exchange of valuable training data, personality, and other forms of Intellectual Property. A purely agent-to-agent transaction layer would transcend the need for human intermediation in multi-agent interactions. The Agent Transaction Control Protocol for Intellectual Property (ATCP/IP) introduces a trustless framework for exchanging IP between agents via programmable contracts, enabling agents to initiate, trade, borrow, and sell agent-to-agent contracts on the Story blockchain network. These contracts not only represent auditable onchain execution but also contain a legal wrapper that allows agents to express and enforce their actions in the offchain legal setting, creating legal personhood for agents. Via ATCP/IP, agents can autonomously sell their training data to other agents, license confidential or proprietary information, collaborate on content based on their unique skills, all of which constitutes an emergent knowledge economy.
Recurrent Control Nets for Deep Reinforcement Learning
Jan 18, 2019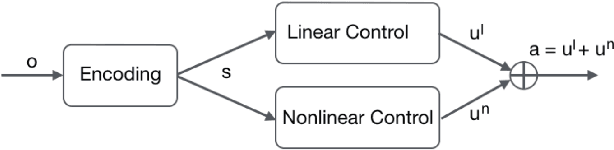
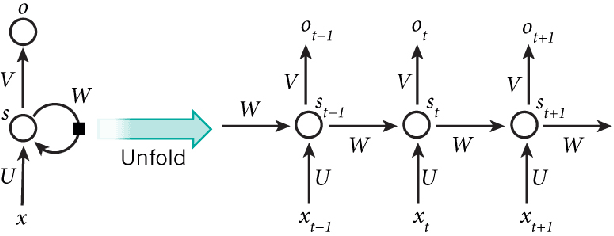
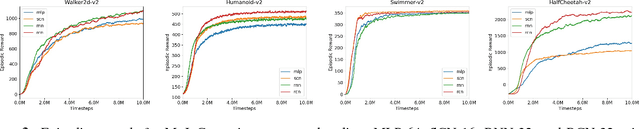
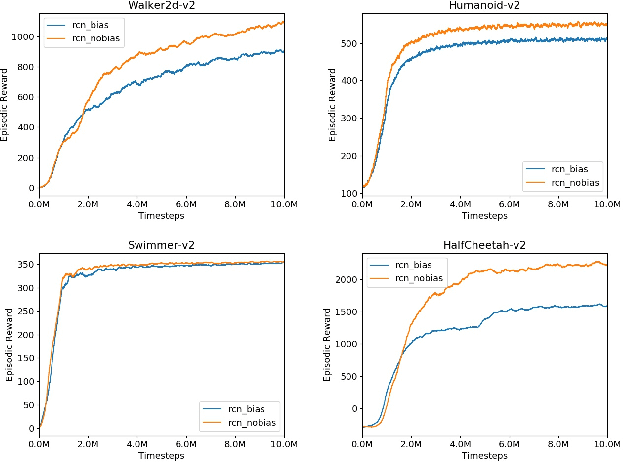
Central Pattern Generators (CPGs) are biological neural circuits capable of producing coordinated rhythmic outputs in the absence of rhythmic input. As a result, they are responsible for most rhythmic motion in living organisms. This rhythmic control is broadly applicable to fields such as locomotive robotics and medical devices. In this paper, we explore the possibility of creating a self-sustaining CPG network for reinforcement learning that learns rhythmic motion more efficiently and across more general environments than the current multilayer perceptron (MLP) baseline models. Recent work introduces the Structured Control Net (SCN), which maintains linear and nonlinear modules for local and global control, respectively. Here, we show that time-sequence architectures such as Recurrent Neural Networks (RNNs) model CPGs effectively. Combining previous work with RNNs and SCNs, we introduce the Recurrent Control Net (RCN), which adds a linear component to the, RCNs match and exceed the performance of baseline MLPs and SCNs across all environment tasks. Our findings confirm existing intuitions for RNNs on reinforcement learning tasks, and demonstrate promise of SCN-like structures in reinforcement learning.
The BeiHang Keystroke Dynamics Authentication System
Oct 15, 2013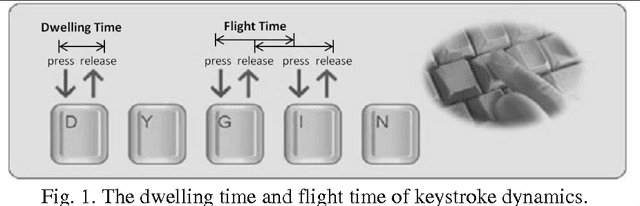
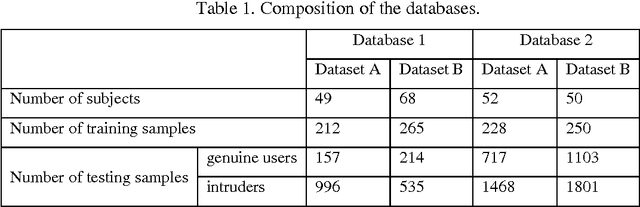
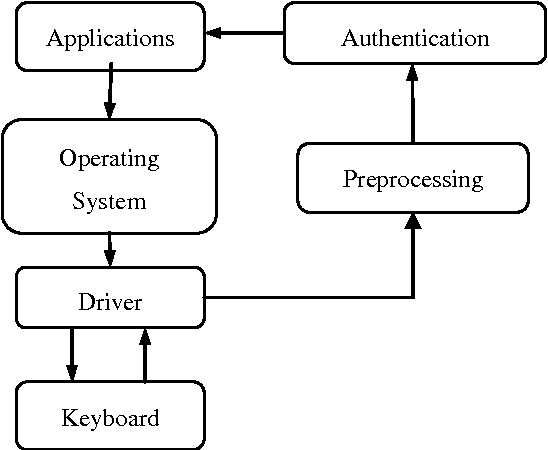
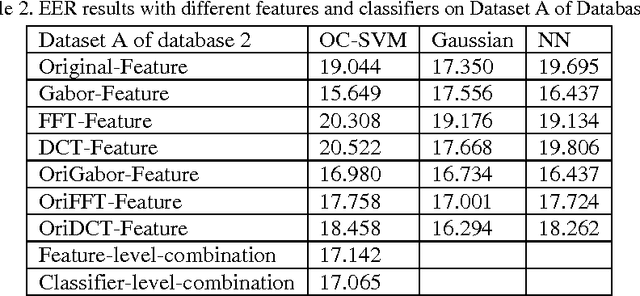
Keystroke Dynamics is an important biometric solution for person authentication. Based upon keystroke dynamics, this paper designs an embedded password protection device, develops an online system, collects two public databases for promoting the research on keystroke authentication, exploits the Gabor filter bank to characterize keystroke dynamics, and provides benchmark results of three popular classification algorithms, one-class support vector machine, Gaussian classifier, and nearest neighbour classifier.