 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDarkFarseer: Inductive Spatio-temporal Kriging via Hidden Style Enhancement and Sparsity-Noise Mitigation
Jan 06, 2025



With the rapid growth of the Internet of Things and Cyber-Physical Systems, widespread sensor deployment has become essential. However, the high costs of building sensor networks limit their scale and coverage, making fine-grained deployment challenging. Inductive Spatio-Temporal Kriging (ISK) addresses this issue by introducing virtual sensors. Based on graph neural networks (GNNs) extracting the relationships between physical and virtual sensors, ISK can infer the measurements of virtual sensors from physical sensors. However, current ISK methods rely on conventional message-passing mechanisms and network architectures, without effectively extracting spatio-temporal features of physical sensors and focusing on representing virtual sensors. Additionally, existing graph construction methods face issues of sparse and noisy connections, destroying ISK performance. To address these issues, we propose DarkFarseer, a novel ISK framework with three key components. First, we propose the Neighbor Hidden Style Enhancement module with a style transfer strategy to enhance the representation of virtual nodes in a temporal-then-spatial manner to better extract the spatial relationships between physical and virtual nodes. Second, we propose Virtual-Component Contrastive Learning, which aims to enrich the node representation by establishing the association between the patterns of virtual nodes and the regional patterns within graph components. Lastly, we design a Similarity-Based Graph Denoising Strategy, which reduces the connectivity strength of noisy connections around virtual nodes and their neighbors based on their temporal information and regional spatial patterns. Extensive experiments demonstrate that DarkFarseer significantly outperforms existing ISK methods.
DeepCell: A Ubiquitous Accurate Provider-side Cellular-based Localization
Jul 24, 2024Although outdoor localization is already available to the general public and businesses through the wide spread use of the GPS, it is not supported by low-end phones, requires a direct line of sight to satellites and can drain phone battery quickly. The current fingerprinting solutions can provide high-accuracy localization but are based on the client side. This limits their ubiquitous deployment and accuracy. In this paper, we introduce DeepCell: a provider-side fingerprinting localization system that can provide high accuracy localization for any cell phone. To build its fingerprint, DeepCell leverages the unlabeled cellular measurements recorded by the cellular provider while opportunistically synchronizing with selected client devices to get location labels. The fingerprint is then used to train a deep neural network model that is harnessed for localization. To achieve this goal, DeepCell need to address a number of challenges including using unlabeled data from the provider side, handling noise and sparsity, scaling the data to large areas, and finally providing enough data that is required for training deep models without overhead. Evaluation of DeepCell in a typical realistic environment shows that it can achieve a consistent median accuracy of 29m. This accuracy outperforms the state-of-the-art client-based cellular-based systems by more than 75.4%. In addition, the same accuracy is extended to low-end phones.
Handling Device Heterogeneity for Deep Learning-based Localization
Jul 24, 2024Deep learning-based fingerprinting is one of the current promising technologies for outdoor localization in cellular networks. However, deploying such localization systems for heterogeneous phones affects their accuracy as the cellular received signal strength (RSS) readings vary for different types of phones. In this paper, we introduce a number of techniques for addressing the phones heterogeneity problem in the deep-learning based localization systems. The basic idea is either to approximate a function that maps the cellular RSS measurements between different devices or to transfer the knowledge across them. Evaluation of the proposed techniques using different Android phones on four independent testbeds shows that our techniques can improve the localization accuracy by more than 220% for the four testbeds as compared to the state-of-the-art systems. This highlights the promise of the proposed device heterogeneity handling techniques for enabling a wide deployment of deep learning-based localization systems over different devices.
RBPGAN: Recurrent Back-Projection GAN for Video Super Resolution
Nov 24, 2023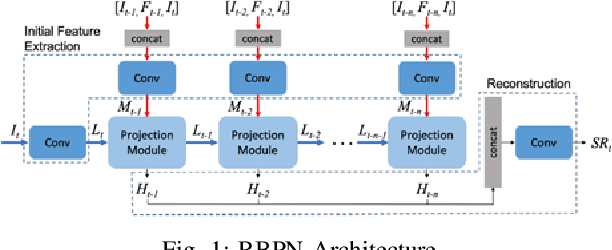
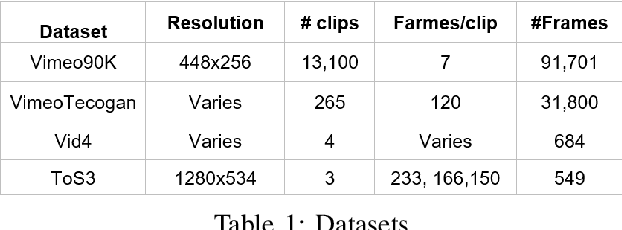
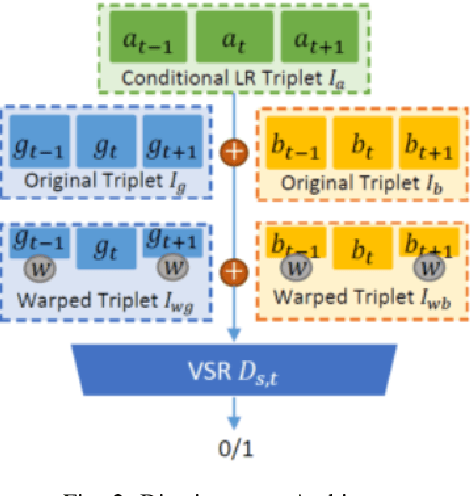
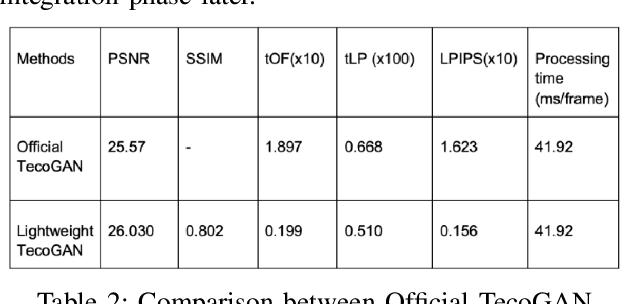
Recently, video super resolution (VSR) has become a very impactful task in the area of Computer Vision due to its various applications. In this paper, we propose Recurrent Back-Projection Generative Adversarial Network (RBPGAN) for VSR in an attempt to generate temporally coherent solutions while preserving spatial details. RBPGAN integrates two state-of-the-art models to get the best in both worlds without compromising the accuracy of produced video. The generator of the model is inspired by RBPN system, while the discriminator is inspired by TecoGAN. We also utilize Ping-Pong loss to increase temporal consistency over time. Our contribution together results in a model that outperforms earlier work in terms of temporally consistent details, as we will demonstrate qualitatively and quantitatively using different datasets.
Privacy-Preserving by Design: Indoor Positioning System Using Wi-Fi Passive TDOA
Jun 03, 2023Indoor localization systems have become increasingly important in a wide range of applications, including industry, security, logistics, and emergency services. However, the growing demand for accurate localization has heightened concerns over privacy, as many localization systems rely on active signals that can be misused by an adversary to track users' movements or manipulate their measurements. This paper presents PassiFi, a novel passive Wi-Fi time-based indoor localization system that effectively balances accuracy and privacy. PassiFi uses a passive WiFi Time Difference of Arrival (TDoA) approach that ensures users' privacy and safeguards the integrity of their measurement data while still achieving high accuracy. The system adopts a fingerprinting approach to address multi-path and non-line-of-sight problems and utilizes deep neural networks to learn the complex relationship between TDoA and location. Evaluation in a real-world testbed demonstrates PassiFi's exceptional performance, surpassing traditional multilateration by 128%, achieving sub-meter accuracy on par with state-of-the-art active measurement systems, all while preserving privacy.
DeepLoc: A Ubiquitous Accurate and Low-Overhead Outdoor Cellular Localization System
Jun 25, 2021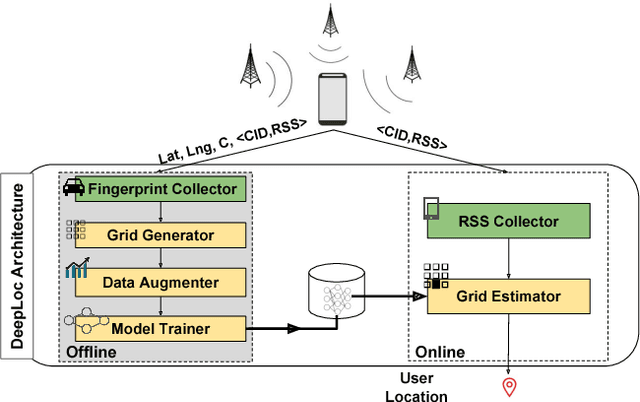
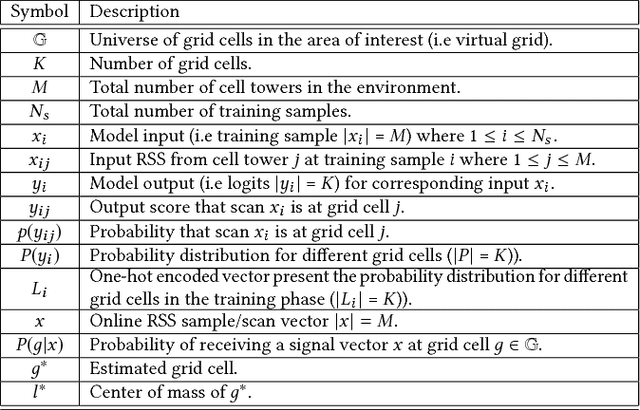
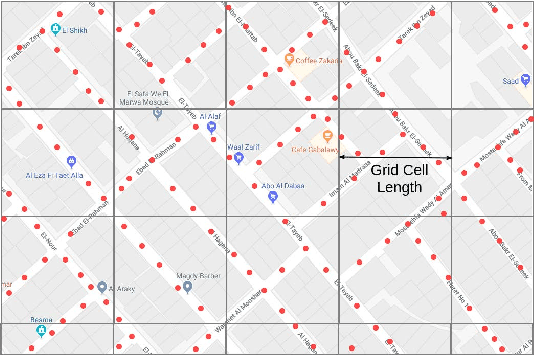
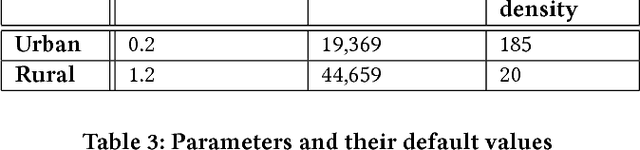
Recent years have witnessed fast growth in outdoor location-based services. While GPS is considered a ubiquitous localization system, it is not supported by low-end phones, requires direct line of sight to the satellites, and can drain the phone battery quickly. In this paper, we propose DeepLoc: a deep learning-based outdoor localization system that obtains GPS-like localization accuracy without its limitations. In particular, DeepLoc leverages the ubiquitous cellular signals received from the different cell towers heard by the mobile device as hints to localize it. To do that, crowd-sensed geo-tagged received signal strength information coming from different cell towers is used to train a deep model that is used to infer the user's position. As part of DeepLoc design, we introduce modules to address a number of practical challenges including scaling the data collection to large areas, handling the inherent noise in the cellular signal and geo-tagged data, as well as providing enough data that is required for deep learning models with low-overhead. We implemented DeepLoc on different Android devices. Evaluation results in realistic urban and rural environments show that DeepLoc can achieve a median localization accuracy within 18.8m in urban areas and within 15.7m in rural areas. This accuracy outperforms the state-of-the-art cellular-based systems by more than 470% and comes with 330% savings in power compared to the GPS. This highlights the promise of DeepLoc as a ubiquitous accurate and low-overhead localization system.
The Effect of Ground Truth Accuracy on the Evaluation of Localization Systems
Jun 25, 2021



The ability to accurately evaluate the performance of location determination systems is crucial for many applications. Typically, the performance of such systems is obtained by comparing ground truth locations with estimated locations. However, these ground truth locations are usually obtained by clicking on a map or using other worldwide available technologies like GPS. This introduces ground truth errors that are due to the marking process, map distortions, or inherent GPS inaccuracy. In this paper, we present a theoretical framework for analyzing the effect of ground truth errors on the evaluation of localization systems. Based on that, we design two algorithms for computing the real algorithmic error from the validation error and marking/map ground truth errors, respectively. We further establish bounds on different performance metrics. Validation of our theoretical assumptions and analysis using real data collected in a typical environment shows the ability of our theoretical framework to correct the estimated error of a localization algorithm in the presence of ground truth errors. Specifically, our marking error algorithm matches the real error CDF within 4%, and our map error algorithm provides a more accurate estimate of the median/tail error by 150%/72% when the map is shifted by 6m.
CrossCount: A Deep Learning System for Device-free Human Counting using WiFi
Jul 07, 2020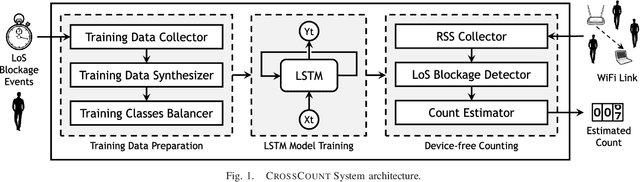
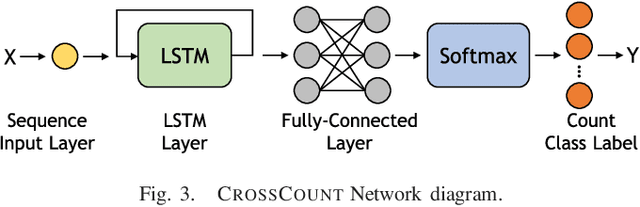
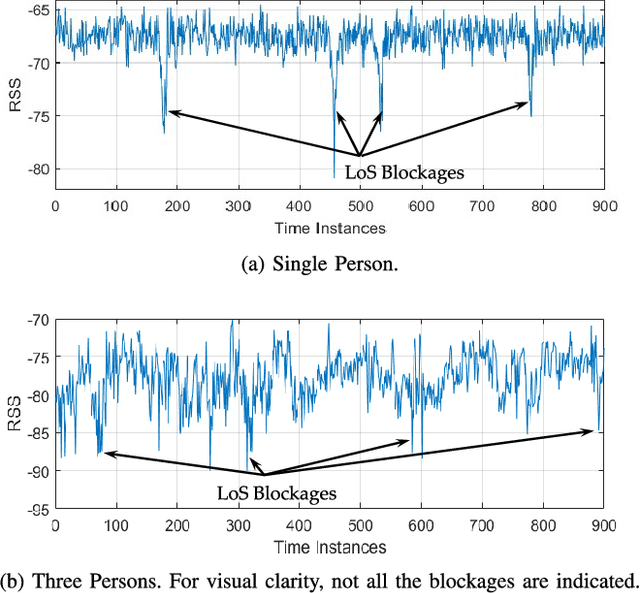
Counting humans is an essential part of many people-centric applications. In this paper, we propose CrossCount: an accurate deep-learning-based human count estimator that uses a single WiFi link to estimate the human count in an area of interest. The main idea is to depend on the temporal link-blockage pattern as a discriminant feature that is more robust to wireless channel noise than the signal strength, hence delivering a ubiquitous and accurate human counting system. As part of its design, CrossCount addresses a number of deep learning challenges such as class imbalance and training data augmentation for enhancing the model generalizability. Implementation and evaluation of CrossCount in multiple testbeds show that it can achieve a human counting accuracy to within a maximum of 2 persons 100% of the time. This highlights the promise of CrossCount as a ubiquitous crowd estimator with non-labour-intensive data collection from off-the-shelf devices.
Trans-Sense: Real Time Transportation Schedule Estimation Using Smart Phones
Jun 14, 2019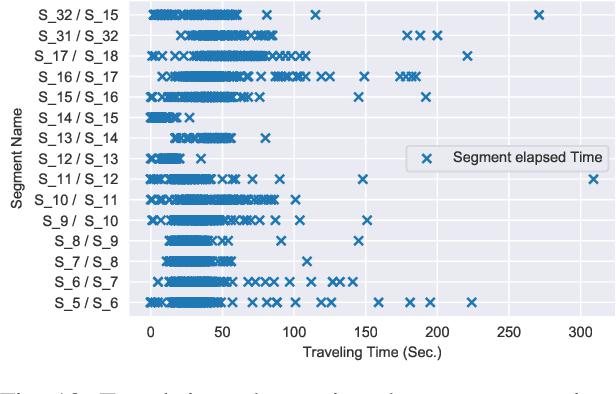



Developing countries suffer from traffic congestion, poorly planned road/rail networks, and lack of access to public transportation facilities. This context results in an increase in fuel consumption, pollution level, monetary losses, massive delays, and less productivity. On the other hand, it has a negative impact on the commuters feelings and moods. Availability of real-time transit information - by providing public transportation vehicles locations using GPS devices - helps in estimating a passenger's waiting time and addressing the above issues. However, such solution is expensive for developing countries. This paper aims at designing and implementing a crowd-sourced mobile phones-based solution to estimate the expected waiting time of a passenger in public transit systems, the prediction of the remaining time to get on/off a vehicle, and to construct a real time public transit schedule. Trans-Sense has been evaluated using real data collected for over 800 hours, on a daily basis, by different Android phones, and using different light rail transit lines at different time spans. The results show that Trans-Sense can achieve an average recall and precision of 95.35% and 90.1%, respectively, in discriminating lightrail stations. Moreover, the empirical distributions governing the different time delays affecting a passenger's total trip time enable predicting the right time of arrival of a passenger to her destination with an accuracy of 91.81%.In addition, the system estimates the stations dimensions with an accuracy of 95.71%.
MonoStream: A Minimal-Hardware High Accuracy Device-free WLAN Localization System
Aug 04, 2013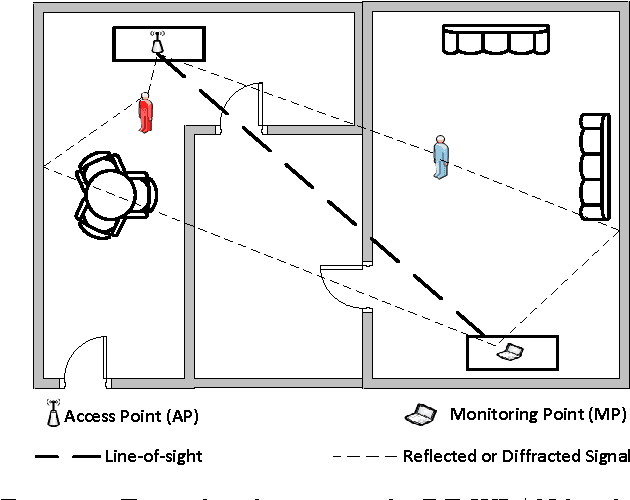
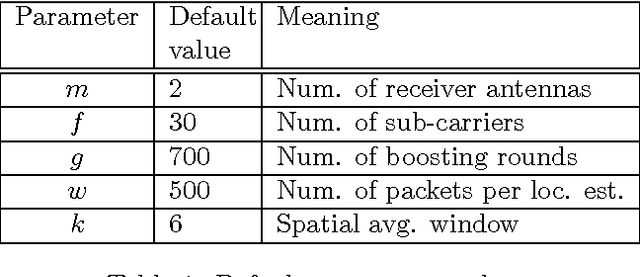
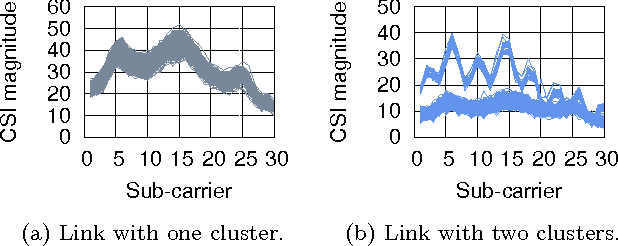
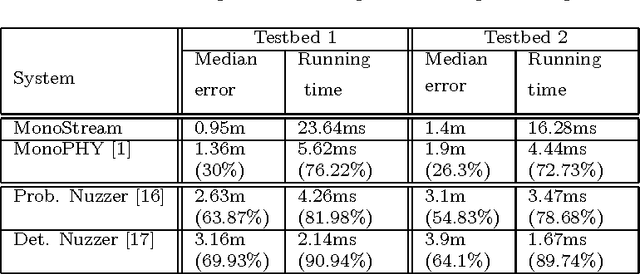
Device-free (DF) localization is an emerging technology that allows the detection and tracking of entities that do not carry any devices nor participate actively in the localization process. Typically, DF systems require a large number of transmitters and receivers to achieve acceptable accuracy, which is not available in many scenarios such as homes and small businesses. In this paper, we introduce MonoStream as an accurate single-stream DF localization system that leverages the rich Channel State Information (CSI) as well as MIMO information from the physical layer to provide accurate DF localization with only one stream. To boost its accuracy and attain low computational requirements, MonoStream models the DF localization problem as an object recognition problem and uses a novel set of CSI-context features and techniques with proven accuracy and efficiency. Experimental evaluation in two typical testbeds, with a side-by-side comparison with the state-of-the-art, shows that MonoStream can achieve an accuracy of 0.95m with at least 26% enhancement in median distance error using a single stream only. This enhancement in accuracy comes with an efficient execution of less than 23ms per location update on a typical laptop. This highlights the potential of MonoStream usage for real-time DF tracking applications.