 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Decentralized Multi-Biped Control for Payload Transport
Jun 25, 2024


Payload transport over flat terrain via multi-wheel robot carriers is well-understood, highly effective, and configurable. In this paper, our goal is to provide similar effectiveness and configurability for transport over rough terrain that is more suitable for legs rather than wheels. For this purpose, we consider multi-biped robot carriers, where wheels are replaced by multiple bipedal robots attached to the carrier. Our main contribution is to design a decentralized controller for such systems that can be effectively applied to varying numbers and configurations of rigidly attached bipedal robots without retraining. We present a reinforcement learning approach for training the controller in simulation that supports transfer to the real world. Our experiments in simulation provide quantitative metrics showing the effectiveness of the approach over a wide variety of simulated transport scenarios. In addition, we demonstrate the controller in the real-world for systems composed of two and three Cassie robots. To our knowledge, this is the first example of a scalable multi-biped payload transport system.
Learning Vision-Based Bipedal Locomotion for Challenging Terrain
Sep 26, 2023Reinforcement learning (RL) for bipedal locomotion has recently demonstrated robust gaits over moderate terrains using only proprioceptive sensing. However, such blind controllers will fail in environments where robots must anticipate and adapt to local terrain, which requires visual perception. In this paper, we propose a fully-learned system that allows bipedal robots to react to local terrain while maintaining commanded travel speed and direction. Our approach first trains a controller in simulation using a heightmap expressed in the robot's local frame. Next, data is collected in simulation to train a heightmap predictor, whose input is the history of depth images and robot states. We demonstrate that with appropriate domain randomization, this approach allows for successful sim-to-real transfer with no explicit pose estimation and no fine-tuning using real-world data. To the best of our knowledge, this is the first example of sim-to-real learning for vision-based bipedal locomotion over challenging terrains.
Learning Dynamic Bipedal Walking Across Stepping Stones
May 03, 2022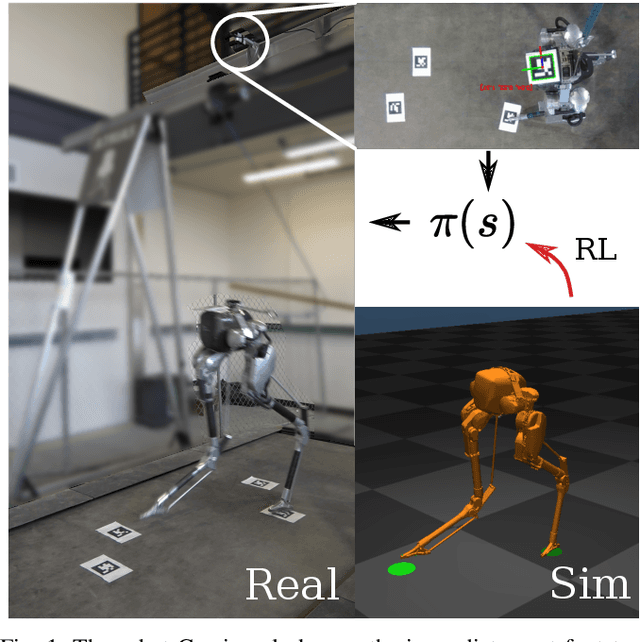
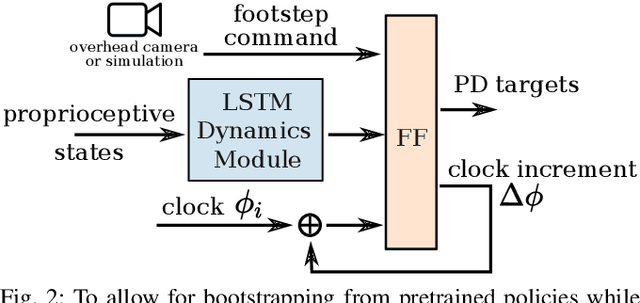
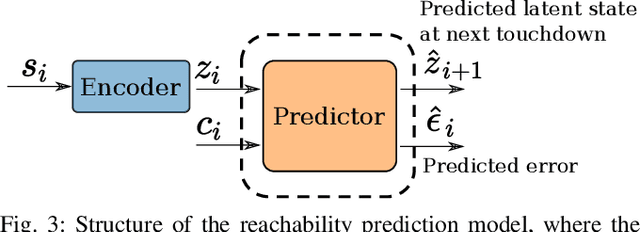
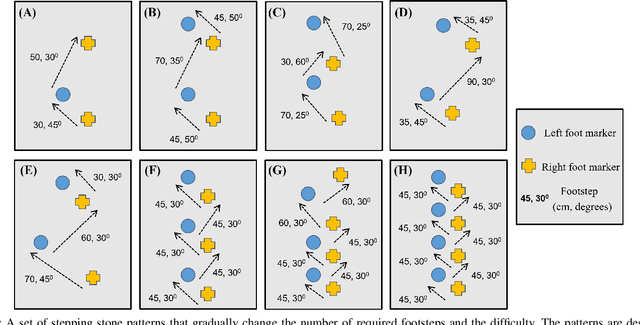
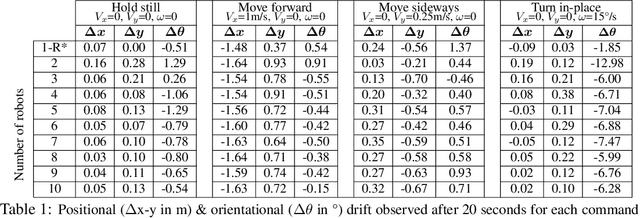
In this work, we propose a learning approach for 3D dynamic bipedal walking when footsteps are constrained to stepping stones. While recent work has shown progress on this problem, real-world demonstrations have been limited to relatively simple open-loop, perception-free scenarios. Our main contribution is a more advanced learning approach that enables real-world demonstrations, using the Cassie robot, of closed-loop dynamic walking over moderately difficult stepping-stone patterns. Our approach first uses reinforcement learning (RL) in simulation to train a controller that maps footstep commands onto joint actions without any reference motion information. We then learn a model of that controller's capabilities, which enables prediction of feasible footsteps given the robot's current dynamic state. The resulting controller and model are then integrated with a real-time overhead camera system for detecting stepping stone locations. For evaluation, we develop a benchmark set of stepping stone patterns, which are used to test performance in both simulation and the real world. Overall, we demonstrate that sim-to-real learning is extremely promising for enabling dynamic locomotion over stepping stones. We also identify challenges remaining that motivate important future research directions.
Fast Obstacle Avoidance Motion in SmallQuadcopter operation in a Cluttered Environment
Sep 19, 2021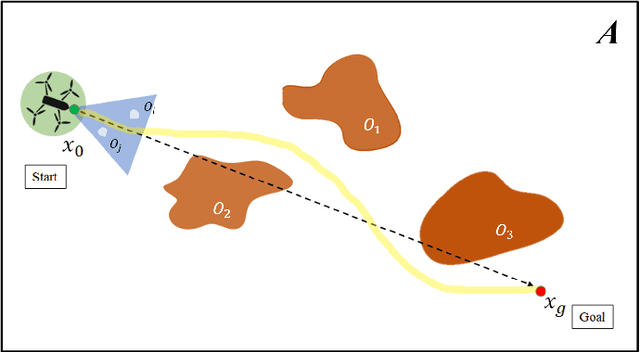
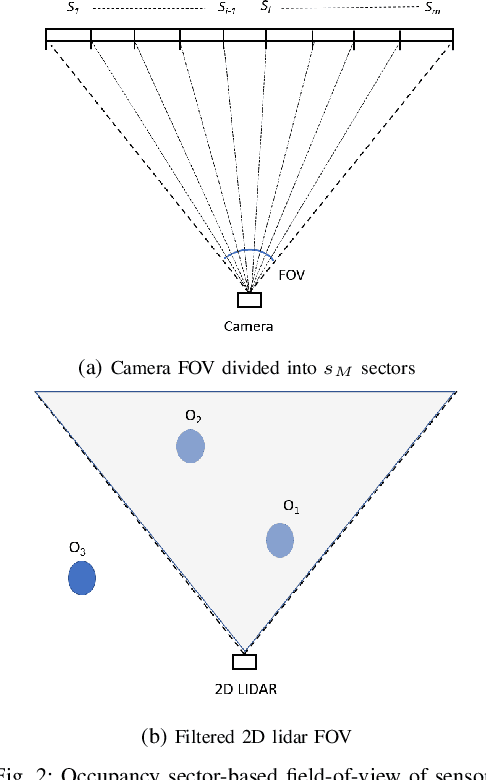
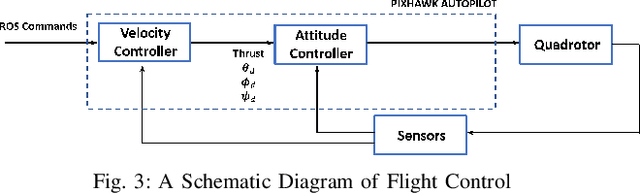
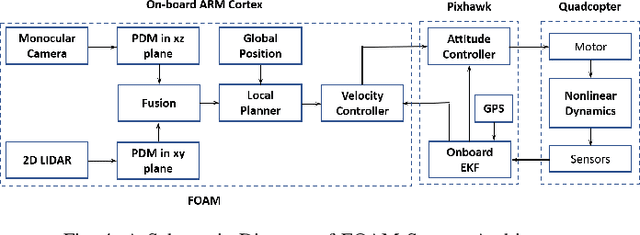
The autonomous operation of small quadcopters moving at high speed in an unknown cluttered environment is a challenging task. Current works in the literature formulate it as a Sense-And-Avoid (SAA) problem and address it by either developing new sensing capabilities or small form-factor processors. However, the SAA, with the high-speed operation, remains an open problem. The significant complexity arises due to the computational latency, which is critical for fast-moving quadcopters. In this paper, a novel Fast Obstacle Avoidance Motion (FOAM) algorithm is proposed to perform SAA operations. FOAM is a low-latency perception-based algorithm that uses multi-sensor fusion of a monocular camera and a 2-D LIDAR. A 2-D probabilistic occupancy map of the sensing region is generated to estimate a free space for avoiding obstacles. Also, a local planner is used to navigate the high-speed quadcopter towards a given target location while avoiding obstacles. The performance evaluation of FOAM is evaluated in simulated environments in Gazebo and AIRSIM. Real-time implementation of the same has been presented in outdoor environments using a custom-designed quadcopter operating at a speed of $4.5$ m/s. The FOAM algorithm is implemented on a low-cost computing device to demonstrate its efficacy. The results indicate that FOAM enables a small quadcopter to operate at high speed in a cluttered environment efficiently.
Autonomous Cooperative Multi-Vehicle System for Interception of Aerial and Stationary Targets in Unknown Environments
Sep 01, 2021This paper presents the design, development, and testing of hardware-software systems by the IISc-TCS team for Challenge 1 of the Mohammed Bin Zayed International Robotics Challenge 2020. The goal of Challenge 1 was to grab a ball suspended from a moving and maneuvering UAV and pop balloons anchored to the ground, using suitable manipulators. The important tasks carried out to address this challenge include the design and development of a hardware system with efficient grabbing and popping mechanisms, considering the restrictions in volume and payload, design of accurate target interception algorithms using visual information suitable for outdoor environments, and development of a software architecture for dynamic multi-agent aerial systems performing complex dynamic missions. In this paper, a single degree of freedom manipulator attached with an end-effector is designed for grabbing and popping, and robust algorithms are developed for the interception of targets in an uncertain environment. Vision-based guidance and tracking laws are proposed based on the concept of pursuit engagement and artificial potential function. The software architecture presented in this work proposes an Operation Management System (OMS) architecture that allocates static and dynamic tasks collaboratively among multiple UAVs to perform any given mission. An important aspect of this work is that all the systems developed were designed to operate in completely autonomous mode. A detailed description of the architecture along with simulations of complete challenge in the Gazebo environment and field experiment results are also included in this work. The proposed hardware-software system is particularly useful for counter-UAV systems and can also be modified in order to cater to several other applications.
Design and Integration of a Drone based Passive Manipulator for Capturing Flying Targets
Feb 23, 2021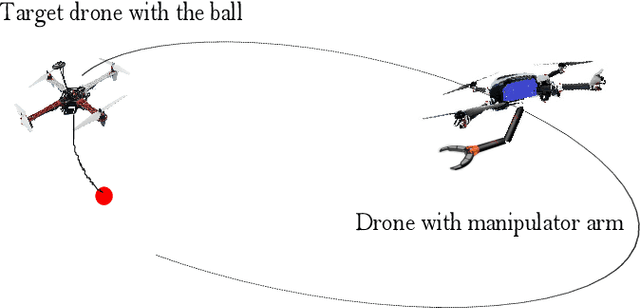
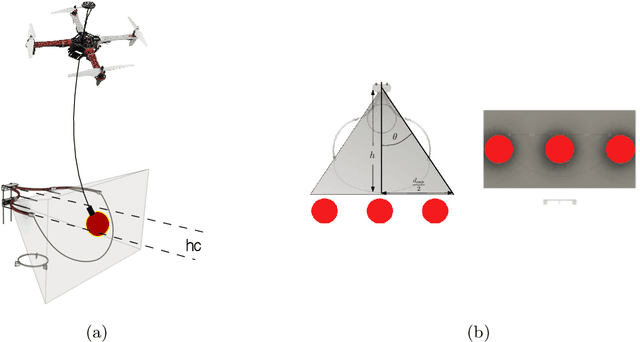
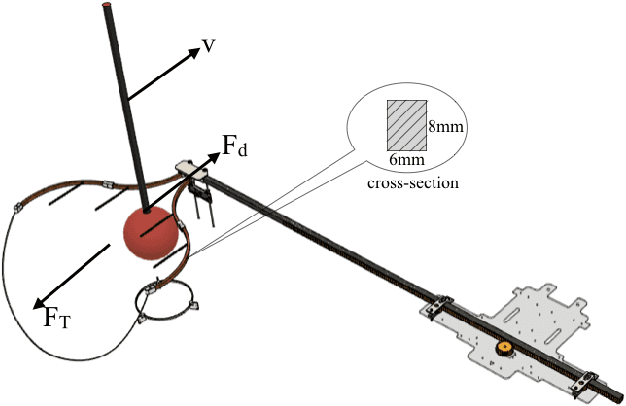

In this paper, we present a novel passive single Degree-of-Freedom (DoF) manipulator design and its integration on an autonomous drone to capture a moving target. The end-effector is designed to be passive, to disengage the moving target from a flying UAV and capture it efficiently in the presence of disturbances, with minimal energy usage. It is also designed to handle target sway and the effect of downwash. The passive manipulator is integrated with the drone through a single Degree of Freedom (DoF) arm, and experiments are carried out in an outdoor environment. The rack-and-pinion mechanism incorporated for this manipulator ensures safety by extending the manipulator beyond the body of the drone to capture the target. The autonomous capturing experiments are conducted using a red ball hanging from a stationary drone and subsequently from a moving drone. The experiments show that the manipulator captures the target with a success rate of 70\% even under environmental/measurement uncertainties and errors.
Design Iterations for Passive Aerial Manipulator
Feb 16, 2021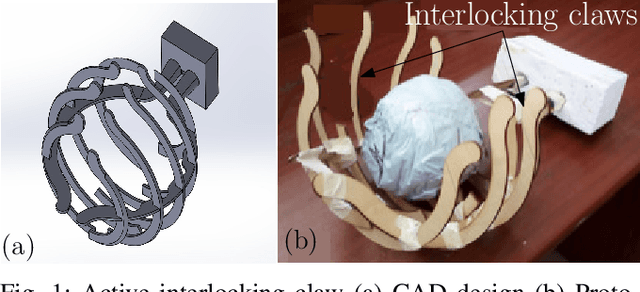
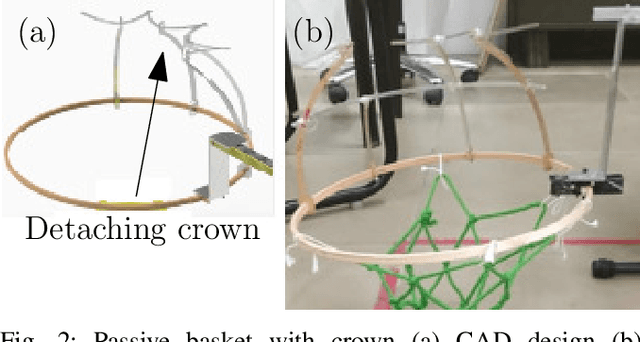

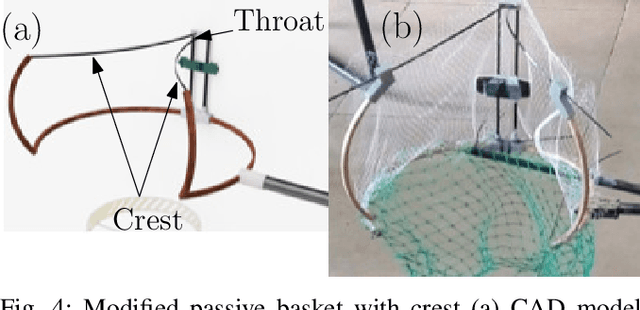
Grabbing a manoeuvring target using drones is a challenging problem. This paper presents the design, development, and prototyping of a novel aerial manipulator for target interception. It is a single Degree of Freedom (DoF) manipulator with passive basket-type end-effector. The proposed design is energy efficient, light weight and suitable for aerial grabbing applications. The detailed design of the proposed manipulation mechanism and a novel in-flight extending propeller guard, is reported in this paper.