 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Dynamic Bipedal Walking Across Stepping Stones
Paper and Code
May 03, 2022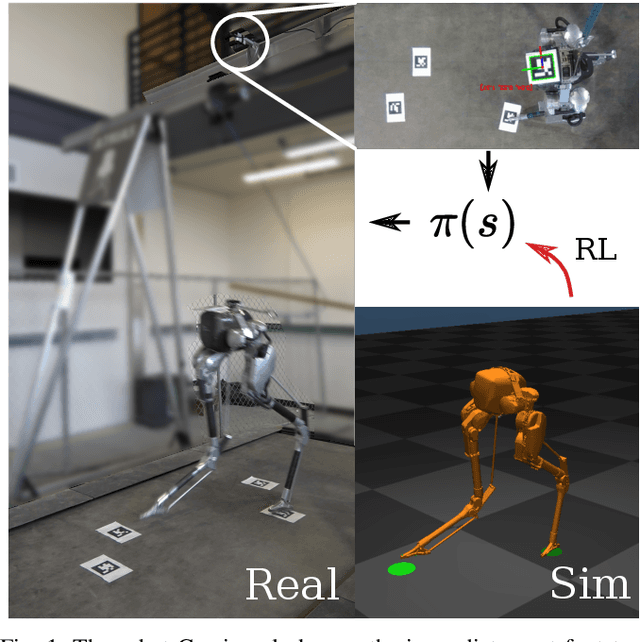
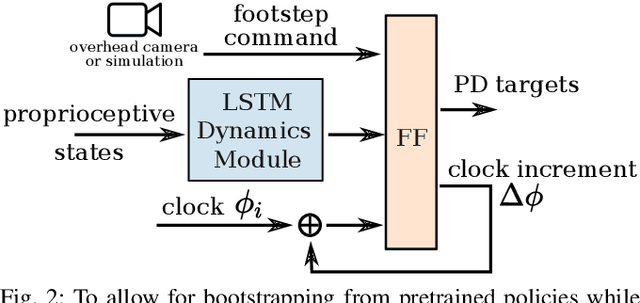
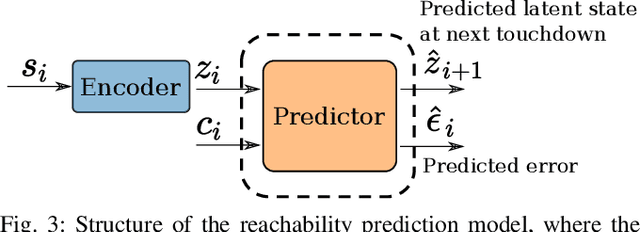
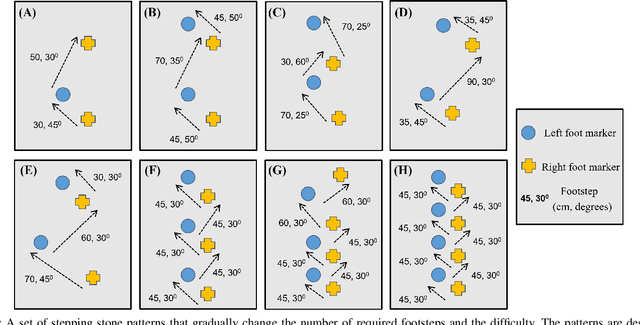
In this work, we propose a learning approach for 3D dynamic bipedal walking when footsteps are constrained to stepping stones. While recent work has shown progress on this problem, real-world demonstrations have been limited to relatively simple open-loop, perception-free scenarios. Our main contribution is a more advanced learning approach that enables real-world demonstrations, using the Cassie robot, of closed-loop dynamic walking over moderately difficult stepping-stone patterns. Our approach first uses reinforcement learning (RL) in simulation to train a controller that maps footstep commands onto joint actions without any reference motion information. We then learn a model of that controller's capabilities, which enables prediction of feasible footsteps given the robot's current dynamic state. The resulting controller and model are then integrated with a real-time overhead camera system for detecting stepping stone locations. For evaluation, we develop a benchmark set of stepping stone patterns, which are used to test performance in both simulation and the real world. Overall, we demonstrate that sim-to-real learning is extremely promising for enabling dynamic locomotion over stepping stones. We also identify challenges remaining that motivate important future research directions.