 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRADIANCE: Radio-Frequency Adversarial Deep-learning Inference for Automated Network Coverage Estimation
Aug 21, 2023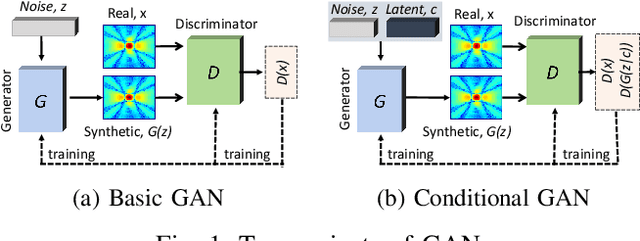

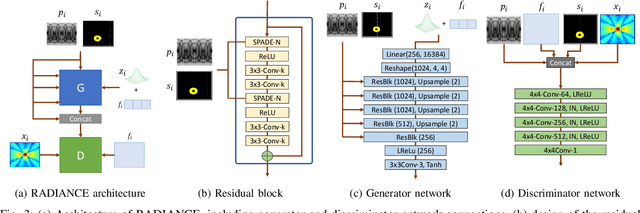

Radio-frequency coverage maps (RF maps) are extensively utilized in wireless networks for capacity planning, placement of access points and base stations, localization, and coverage estimation. Conducting site surveys to obtain RF maps is labor-intensive and sometimes not feasible. In this paper, we propose radio-frequency adversarial deep-learning inference for automated network coverage estimation (RADIANCE), a generative adversarial network (GAN) based approach for synthesizing RF maps in indoor scenarios. RADIANCE utilizes a semantic map, a high-level representation of the indoor environment to encode spatial relationships and attributes of objects within the environment and guide the RF map generation process. We introduce a new gradient-based loss function that computes the magnitude and direction of change in received signal strength (RSS) values from a point within the environment. RADIANCE incorporates this loss function along with the antenna pattern to capture signal propagation within a given indoor configuration and generate new patterns under new configuration, antenna (beam) pattern, and center frequency. Extensive simulations are conducted to compare RADIANCE with ray-tracing simulations of RF maps. Our results show that RADIANCE achieves a mean average error (MAE) of 0.09, root-mean-squared error (RMSE) of 0.29, peak signal-to-noise ratio (PSNR) of 10.78, and multi-scale structural similarity index (MS-SSIM) of 0.80.
Game of GANs: Game Theoretical Models for Generative Adversarial Networks
Jun 15, 2021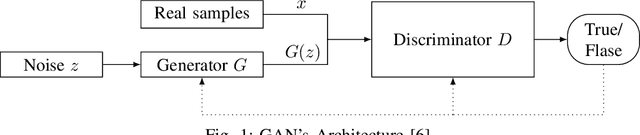
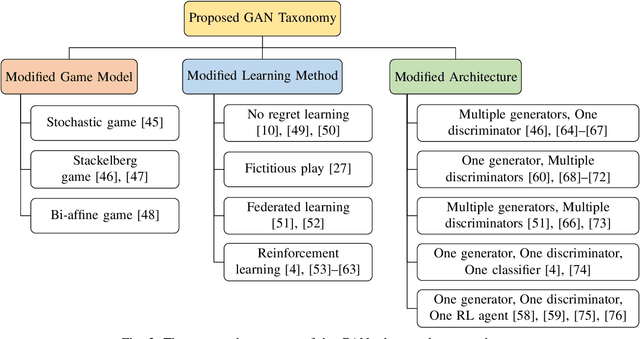
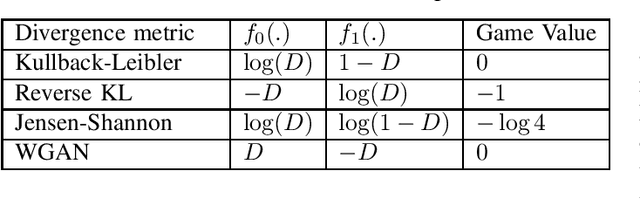
Generative Adversarial Network, as a promising research direction in the AI community, recently attracts considerable attention due to its ability to generating high-quality realistic data. GANs are a competing game between two neural networks trained in an adversarial manner to reach a Nash equilibrium. Despite the improvement accomplished in GANs in the last years, there remain several issues to solve. In this way, how to tackle these issues and make advances leads to rising research interests. This paper reviews literature that leverages the game theory in GANs and addresses how game models can relieve specific generative models' challenges and improve the GAN's performance. In particular, we firstly review some preliminaries, including the basic GAN model and some game theory backgrounds. After that, we present our taxonomy to summarize the state-of-the-art solutions into three significant categories: modified game model, modified architecture, and modified learning method. The classification is based on the modifications made in the basic model by the proposed approaches from the game-theoretic perspective. We further classify each category into several subcategories. Following the proposed taxonomy, we explore the main objective of each class and review the recent work in each group. Finally, we discuss the remaining challenges in this field and present the potential future research topics.
Efficient UAV Trajectory-Planning using Economic Reinforcement Learning
Mar 03, 2021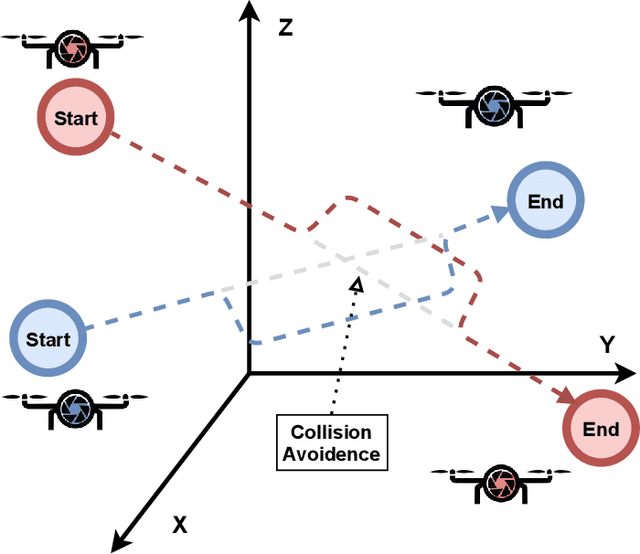
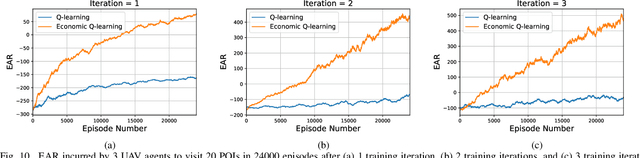
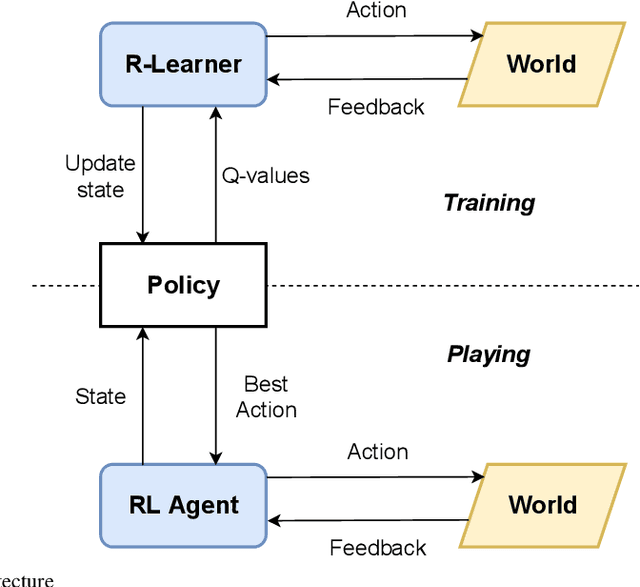
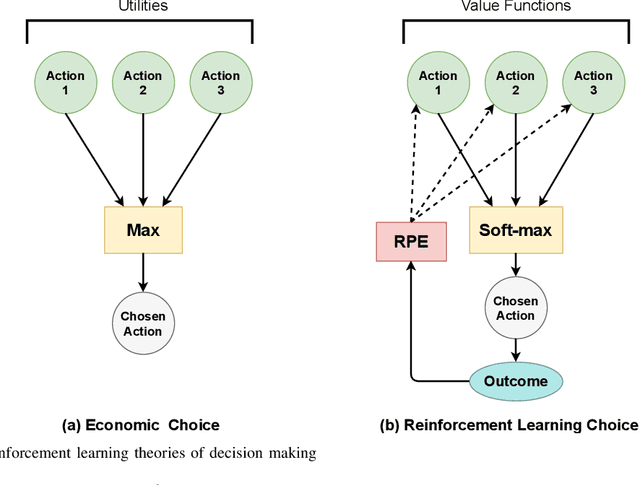
Advances in unmanned aerial vehicle (UAV) design have opened up applications as varied as surveillance, firefighting, cellular networks, and delivery applications. Additionally, due to decreases in cost, systems employing fleets of UAVs have become popular. The uniqueness of UAVs in systems creates a novel set of trajectory or path planning and coordination problems. Environments include many more points of interest (POIs) than UAVs, with obstacles and no-fly zones. We introduce REPlanner, a novel multi-agent reinforcement learning algorithm inspired by economic transactions to distribute tasks between UAVs. This system revolves around an economic theory, in particular an auction mechanism where UAVs trade assigned POIs. We formulate the path planning problem as a multi-agent economic game, where agents can cooperate and compete for resources. We then translate the problem into a Partially Observable Markov decision process (POMDP), which is solved using a reinforcement learning (RL) model deployed on each agent. As the system computes task distributions via UAV cooperation, it is highly resilient to any change in the swarm size. Our proposed network and economic game architecture can effectively coordinate the swarm as an emergent phenomenon while maintaining the swarm's operation. Evaluation results prove that REPlanner efficiently outperforms conventional RL-based trajectory search.
Modeling the Hallucinating Brain: A Generative Adversarial Framework
Feb 09, 2021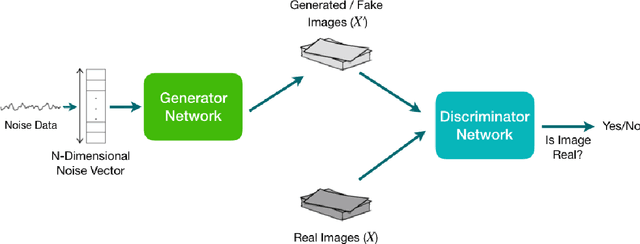
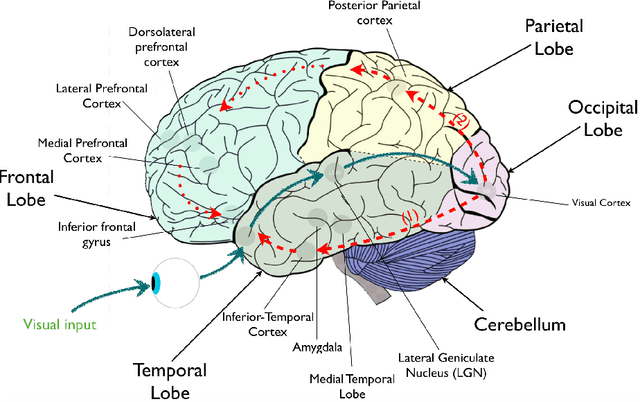
This paper looks into the modeling of hallucination in the human's brain. Hallucinations are known to be causally associated with some malfunctions within the interaction of different areas of the brain involved in perception. Focusing on visual hallucination and its underlying causes, we identify an adversarial mechanism between different parts of the brain which are responsible in the process of visual perception. We then show how the characterized adversarial interactions in the brain can be modeled by a generative adversarial network.
Evaluating Sparse Interpretable Word Embeddings for Biomedical Domain
May 11, 2020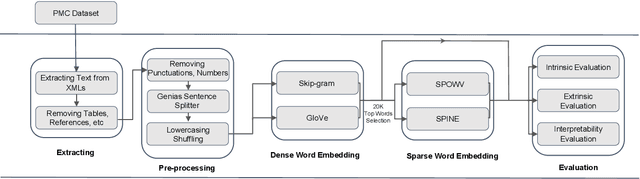
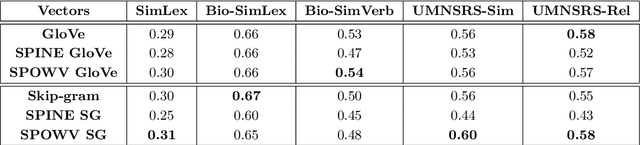
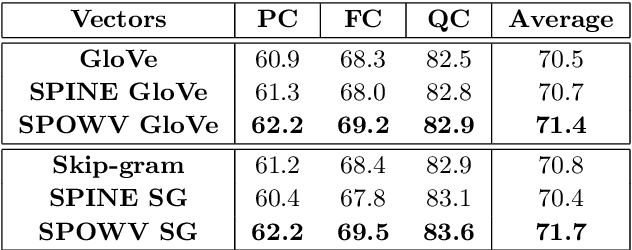
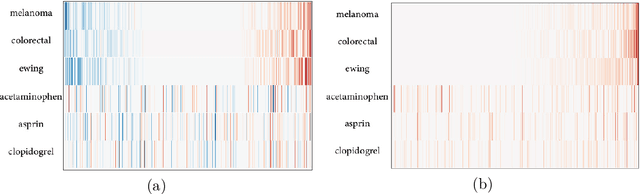
Word embeddings have found their way into a wide range of natural language processing tasks including those in the biomedical domain. While these vector representations successfully capture semantic and syntactic word relations, hidden patterns and trends in the data, they fail to offer interpretability. Interpretability is a key means to justification which is an integral part when it comes to biomedical applications. We present an inclusive study on interpretability of word embeddings in the medical domain, focusing on the role of sparse methods. Qualitative and quantitative measurements and metrics for interpretability of word vector representations are provided. For the quantitative evaluation, we introduce an extensive categorized dataset that can be used to quantify interpretability based on category theory. Intrinsic and extrinsic evaluation of the studied methods are also presented. As for the latter, we propose datasets which can be utilized for effective extrinsic evaluation of word vectors in the biomedical domain. Based on our experiments, it is seen that sparse word vectors show far more interpretability while preserving the performance of their original vectors in downstream tasks.
On Detecting Hidden Third-Party Web Trackers with a Wide Dependency Chain Graph: A Representation Learning Approach
Apr 29, 2020
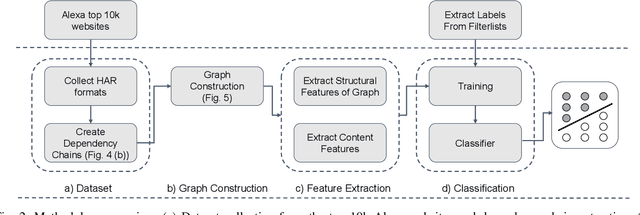

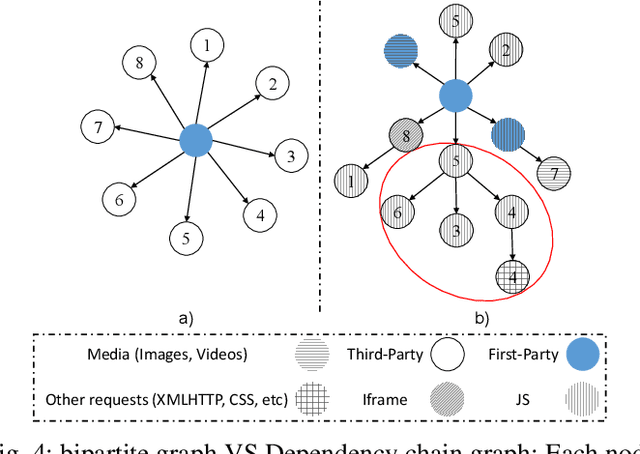
Websites use third-party ads and tracking services to deliver targeted ads and collect information about users that visit them. These services put users privacy at risk and that's why users demand to block these services is growing. Most of the blocking solutions rely on crowd-sourced filter lists that are built and maintained manually by a large community of users. In this work, we seek to simplify the update of these filter lists by automatic detection of hidden advertisements. Existing tracker detection approaches generally focus on each individual website's URL patterns, code structure and/or DOM structure of website. Our work differs from existing approaches by combining different websites through a large scale graph connecting all resource requests made over a large set of sites. This graph is thereafter used to train a machine learning model, through graph representation learning to detect ads and tracking resources. As our approach combines different sources of information, it is more robust toward evasion techniques that use obfuscation or change usage patterns. We evaluate our work over the Alexa top-10K websites, and find its accuracy to be 90.9% also it can block new ads and tracking services which would necessitate to be blocked further crowd-sourced existing filter lists. Moreover, the approach followed in this paper sheds light on the ecosystem of third party tracking and advertising