 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCURE: Enabling RF Energy Harvesting using Cell-Free Massive MIMO UAVs Assisted by RIS
Jul 22, 2021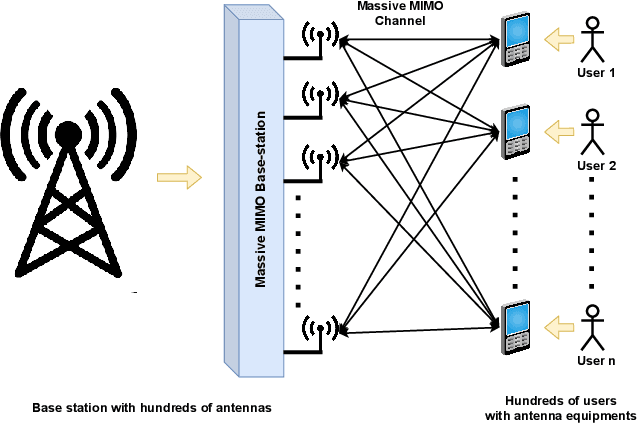

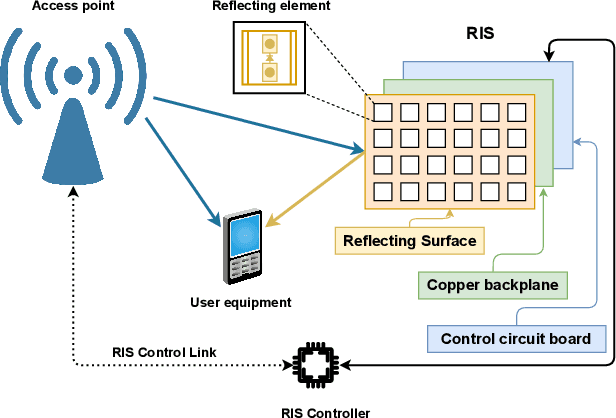
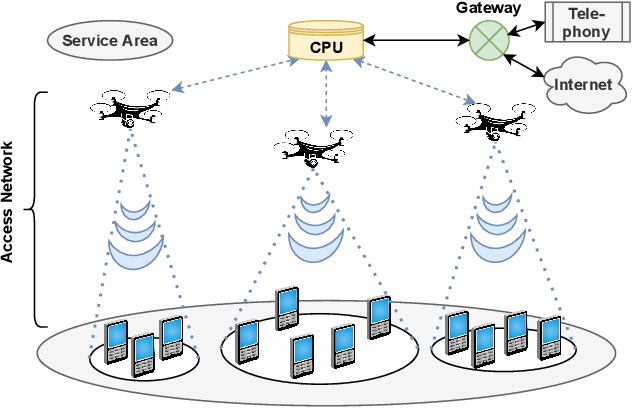
The ever-evolving internet of things (IoT) has led to the growth of numerous wireless sensors, communicating through the internet infrastructure. When designing a network using these sensors, one critical aspect is the longevity and self-sustainability of these devices. For extending the lifetime of these sensors, radio frequency energy harvesting (RFEH) technology has proved to be promising. In this paper, we propose CURE, a novel framework for RFEH that effectively combines the benefits of cell-free massive MIMO (CFmMIMO), unmanned aerial vehicles (UAVs), and reconfigurable intelligent surfaces (RISs) to provide seamless energy harvesting to IoT devices. We consider UAV as an access point (AP) in the CFmMIMO framework. To enhance the signal strength of the RFEH and information transfer, we leverage RISs owing to their passive reflection capability. Based on an extensive simulation, we validate our framework's performance by comparing the max-min fairness (MMF) algorithm for the amount of harvested energy.
A Novel Framework for Threat Analysis of Machine Learning-based Smart Healthcare Systems
Mar 05, 2021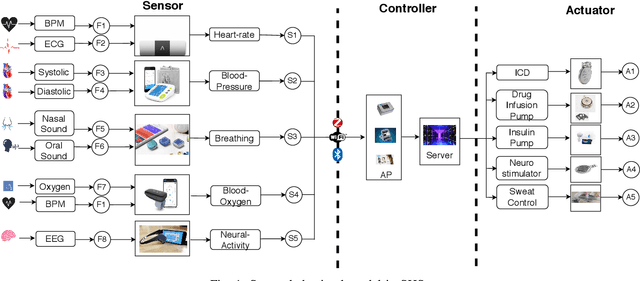
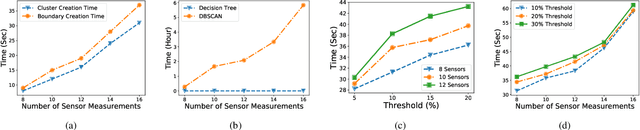
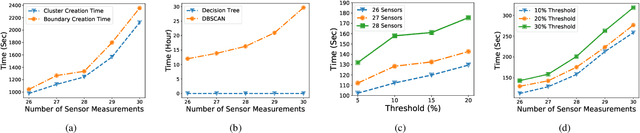
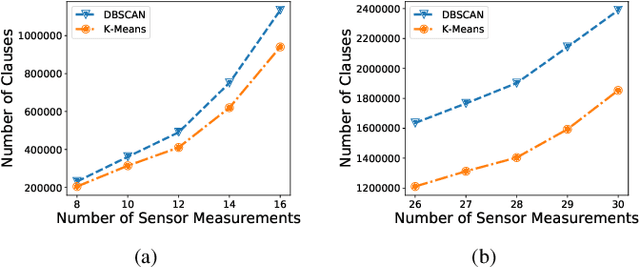
Smart healthcare systems (SHSs) are providing fast and efficient disease treatment leveraging wireless body sensor networks (WBSNs) and implantable medical devices (IMDs)-based internet of medical things (IoMT). In addition, IoMT-based SHSs are enabling automated medication, allowing communication among myriad healthcare sensor devices. However, adversaries can launch various attacks on the communication network and the hardware/firmware to introduce false data or cause data unavailability to the automatic medication system endangering the patient's life. In this paper, we propose SHChecker, a novel threat analysis framework that integrates machine learning and formal analysis capabilities to identify potential attacks and corresponding effects on an IoMT-based SHS. Our framework can provide us with all potential attack vectors, each representing a set of sensor measurements to be altered, for an SHS given a specific set of attack attributes, allowing us to realize the system's resiliency, thus the insight to enhance the robustness of the model. We implement SHChecker on a synthetic and a real dataset, which affirms that our framework can reveal potential attack vectors in an IoMT system. This is a novel effort to formally analyze supervised and unsupervised machine learning models for black-box SHS threat analysis.
Efficient UAV Trajectory-Planning using Economic Reinforcement Learning
Mar 03, 2021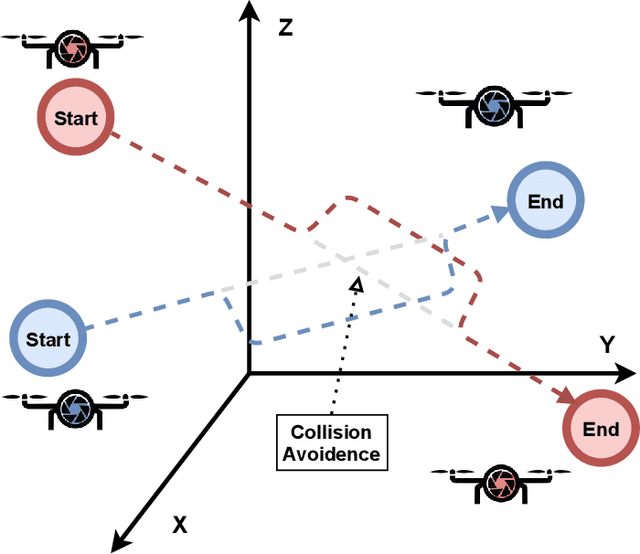
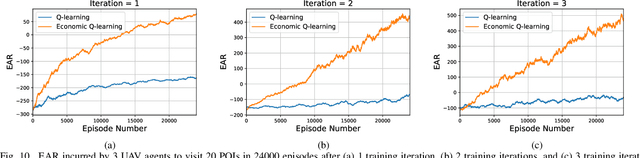
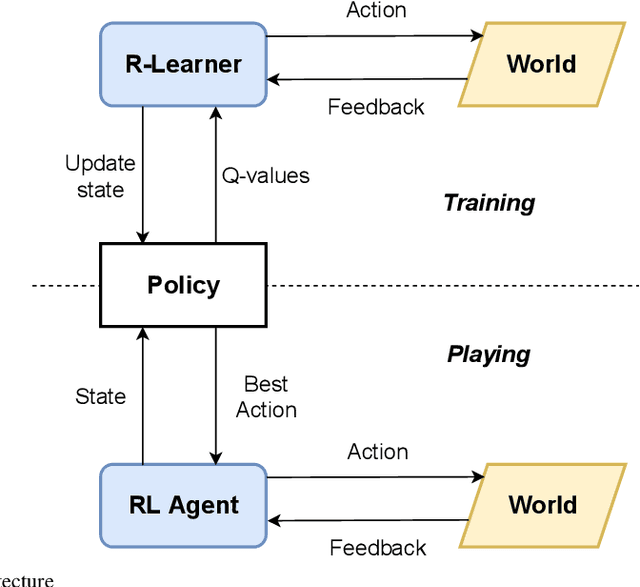
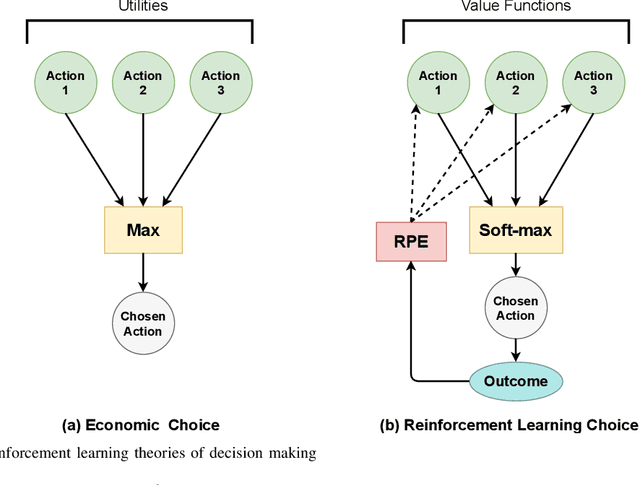
Advances in unmanned aerial vehicle (UAV) design have opened up applications as varied as surveillance, firefighting, cellular networks, and delivery applications. Additionally, due to decreases in cost, systems employing fleets of UAVs have become popular. The uniqueness of UAVs in systems creates a novel set of trajectory or path planning and coordination problems. Environments include many more points of interest (POIs) than UAVs, with obstacles and no-fly zones. We introduce REPlanner, a novel multi-agent reinforcement learning algorithm inspired by economic transactions to distribute tasks between UAVs. This system revolves around an economic theory, in particular an auction mechanism where UAVs trade assigned POIs. We formulate the path planning problem as a multi-agent economic game, where agents can cooperate and compete for resources. We then translate the problem into a Partially Observable Markov decision process (POMDP), which is solved using a reinforcement learning (RL) model deployed on each agent. As the system computes task distributions via UAV cooperation, it is highly resilient to any change in the swarm size. Our proposed network and economic game architecture can effectively coordinate the swarm as an emergent phenomenon while maintaining the swarm's operation. Evaluation results prove that REPlanner efficiently outperforms conventional RL-based trajectory search.