 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobotPerf: An Open-Source, Vendor-Agnostic, Benchmarking Suite for Evaluating Robotics Computing System Performance
Sep 17, 2023
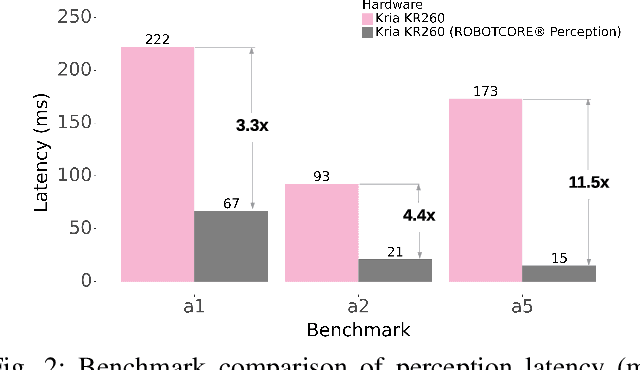

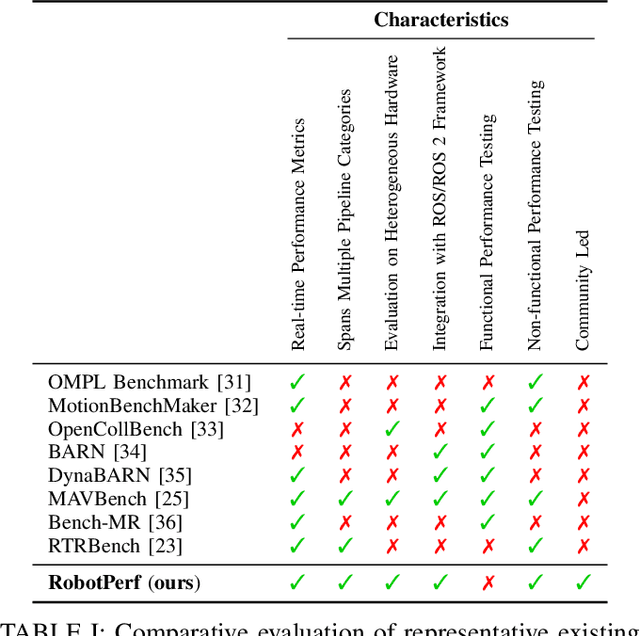
We introduce RobotPerf, a vendor-agnostic benchmarking suite designed to evaluate robotics computing performance across a diverse range of hardware platforms using ROS 2 as its common baseline. The suite encompasses ROS 2 packages covering the full robotics pipeline and integrates two distinct benchmarking approaches: black-box testing, which measures performance by eliminating upper layers and replacing them with a test application, and grey-box testing, an application-specific measure that observes internal system states with minimal interference. Our benchmarking framework provides ready-to-use tools and is easily adaptable for the assessment of custom ROS 2 computational graphs. Drawing from the knowledge of leading robot architects and system architecture experts, RobotPerf establishes a standardized approach to robotics benchmarking. As an open-source initiative, RobotPerf remains committed to evolving with community input to advance the future of hardware-accelerated robotics.
Speculative Path Planning
Feb 15, 2021
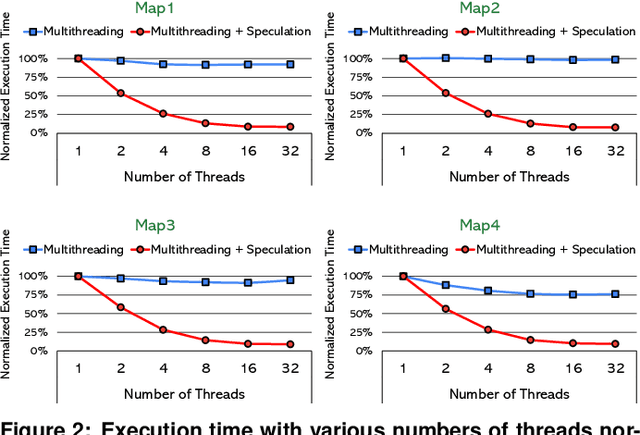
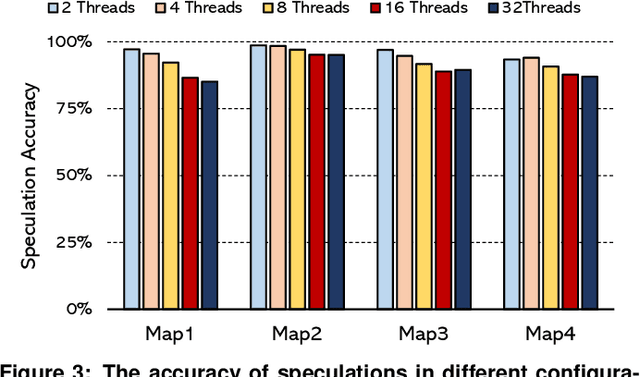
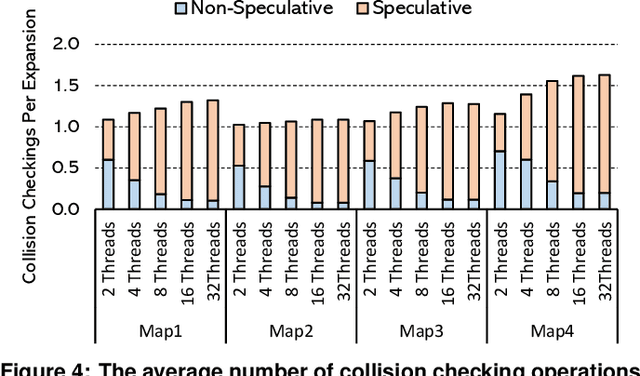
Parallelization of A* path planning is mostly limited by the number of possible motions, which is far less than the level of parallelism that modern processors support. In this paper, we go beyond the limitations of traditional parallelism of A* and propose Speculative Path Planning to accelerate the search when there are abundant idle resources. The key idea of our approach is predicting future state expansions relying on patterns among expansions and aggressively parallelize the computations of prospective states (i.e. pre-evaluate the expensive collision checking operation of prospective nodes). This method allows us to maintain the same search order as of vanilla A* and safeguard any optimality guarantees. We evaluate our method on various configurations and show that on a machine with 32 physical cores, our method improves the performance around 11x and 10x on average over counterpart single-threaded and multi-threaded implementations respectively. The code to our paper can be found here: https://github.com/bakhshalipour/speculative-path-planning.