 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeODE Methods for Computing One-Dimensional Self-Motion Manifolds
Jul 29, 2025Redundant manipulators are well understood to offer infinite joint configurations for achieving a desired end-effector pose. The multiplicity of inverse kinematics (IK) solutions allows for the simultaneous solving of auxiliary tasks like avoiding joint limits or obstacles. However, the most widely used IK solvers are numerical gradient-based iterative methods that inherently return a locally optimal solution. In this work, we explore the computation of self-motion manifolds (SMMs), which represent the set of all joint configurations that solve the inverse kinematics problem for redundant manipulators. Thus, SMMs are global IK solutions for redundant manipulators. We focus on task redundancies of dimensionality 1, introducing a novel ODE formulation for computing SMMs using standard explicit fixed-step ODE integrators. We also address the challenge of ``inducing'' redundancy in otherwise non-redundant manipulators assigned to tasks naturally described by one degree of freedom less than the non-redundant manipulator. Furthermore, recognizing that SMMs can consist of multiple disconnected components, we propose methods for searching for these separate SMM components. Our formulations and algorithms compute accurate SMM solutions without requiring additional IK refinement, and we extend our methods to prismatic joint systems -- an area not covered in current SMM literature. This manuscript presents the derivation of these methods and several examples that show how the methods work and their limitations.
A Systematic Robot Design Optimization Methodology with Application to Redundant Dual-Arm Manipulators
Jul 29, 2025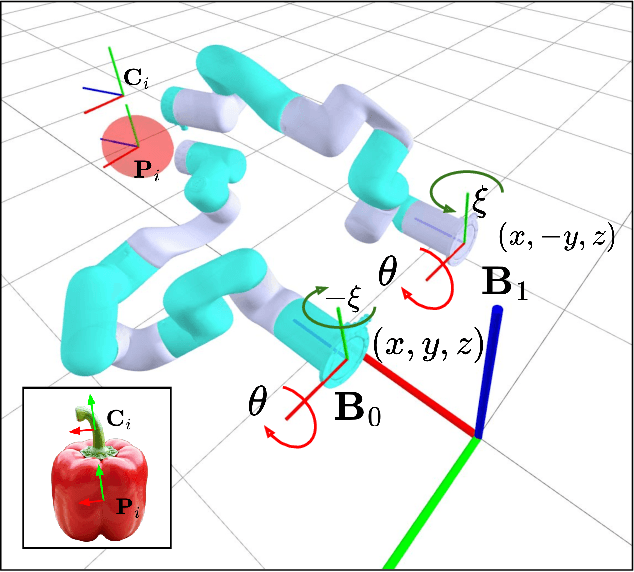
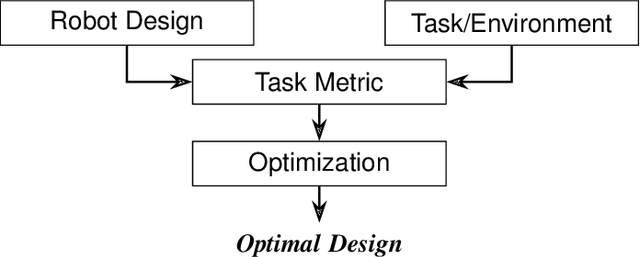
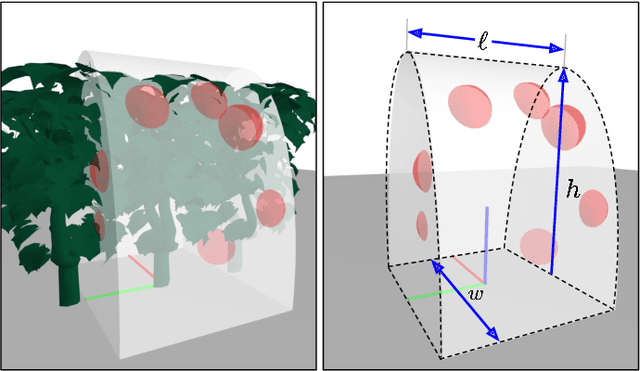

One major recurring challenge in deploying manipulation robots is determining the optimal placement of manipulators to maximize performance. This challenge is exacerbated in complex, cluttered agricultural environments of high-value crops, such as flowers, fruits, and vegetables, that could greatly benefit from robotic systems tailored to their specific requirements. However, the design of such systems remains a challenging, intuition-driven process, limiting the affordability and adoption of robotics-based automation by domain experts like farmers. To address this challenge, we propose a four-part design optimization methodology for automating the development of task-specific robotic systems. This framework includes (a) a robot design model, (b) task and environment representations for simulation, (c) task-specific performance metrics, and (d) optimization algorithms for refining configurations. We demonstrate our framework by optimizing a dual-arm robotic system for pepper harvesting using two off-the-shelf redundant manipulators. To enhance performance, we introduce novel task metrics that leverage self-motion manifolds to characterize manipulator redundancy comprehensively. Our results show that our framework achieves simultaneous improvements in reachability success rates and improvements in dexterity. Specifically, our approach improves reachability success by at least 14\% over baseline methods and achieves over 30\% improvement in dexterity based on our task-specific metric.
Hefty: A Modular Reconfigurable Robot for Advancing Robot Manipulation in Agriculture
Feb 28, 2024This paper presents a modular, reconfigurable robot platform for robot manipulation in agriculture. While robot manipulation promises great advancements in automating challenging, complex tasks that are currently best left to humans, it is also an expensive capital investment for researchers and users because it demands significantly varying robot configurations depending on the task. Modular robots provide a way to obtain multiple configurations and reduce costs by enabling incremental acquisition of only the necessary modules. The robot we present, Hefty, is designed to be modular and reconfigurable. It is designed for both researchers and end-users as a means to improve technology transfer from research to real-world application. This paper provides a detailed design and integration process, outlining the critical design decisions that enable modularity in the mobility of the robot as well as its sensor payload, power systems, computing, and fixture mounting. We demonstrate the utility of the robot by presenting five configurations used in multiple real-world agricultural robotics applications.
Towards Autonomous Crop Monitoring: Inserting Sensors in Cluttered Environments
Nov 07, 2023We present a contact-based phenotyping robot platform that can autonomously insert nitrate sensors into cornstalks to proactively monitor macronutrient levels in crops. This task is challenging because inserting such sensors requires sub-centimeter precision in an environment which contains high levels of clutter, lighting variation, and occlusion. To address these challenges, we develop a robust perception-action pipeline to detect and grasp stalks, and create a custom robot gripper which mechanically aligns the sensor before inserting it into the stalk. Through experimental validation on 48 unique stalks in a cornfield in Iowa, we demonstrate our platform's capability of detecting a stalk with 94% success, grasping a stalk with 90% success, and inserting a sensor with 60% success. In addition to developing an autonomous phenotyping research platform, we share key challenges and insights obtained from deployment in the field. Our research platform is open-sourced, with additional information available at https://kantor-lab.github.io/cornbot.
Speculative Path Planning
Feb 15, 2021
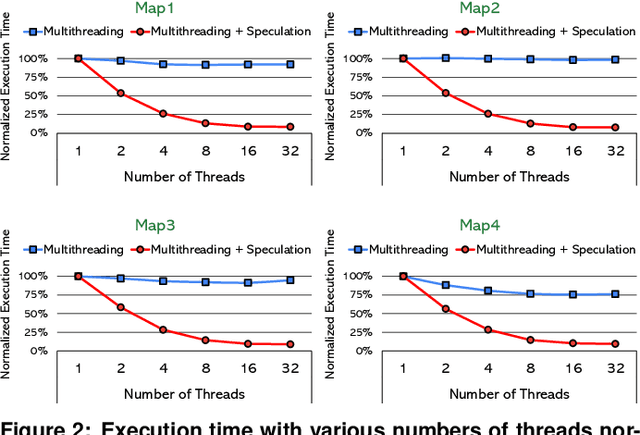
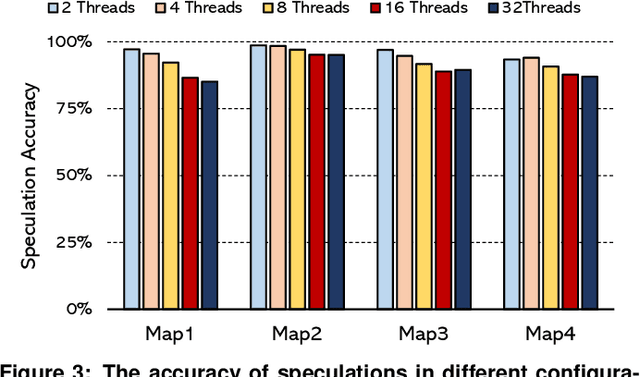
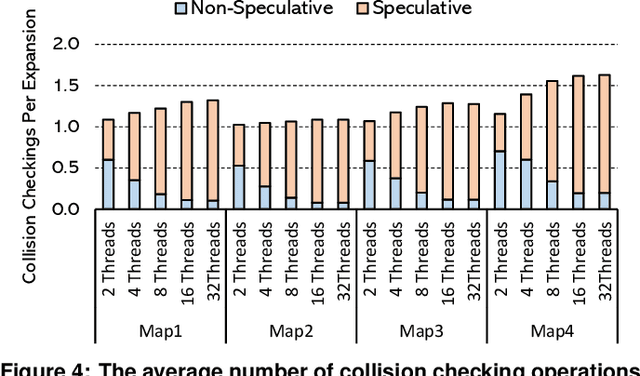
Parallelization of A* path planning is mostly limited by the number of possible motions, which is far less than the level of parallelism that modern processors support. In this paper, we go beyond the limitations of traditional parallelism of A* and propose Speculative Path Planning to accelerate the search when there are abundant idle resources. The key idea of our approach is predicting future state expansions relying on patterns among expansions and aggressively parallelize the computations of prospective states (i.e. pre-evaluate the expensive collision checking operation of prospective nodes). This method allows us to maintain the same search order as of vanilla A* and safeguard any optimality guarantees. We evaluate our method on various configurations and show that on a machine with 32 physical cores, our method improves the performance around 11x and 10x on average over counterpart single-threaded and multi-threaded implementations respectively. The code to our paper can be found here: https://github.com/bakhshalipour/speculative-path-planning.