 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnd-of-Life of Software How is it Defined and Managed?
Apr 08, 2022The rapid development of new software and algorithms, fueled by the immense amount of data available, has made the shelf life of software products a lot shorter. With a rough estimate of more than 40,000 new software projects developed every day, it is becoming quicker and cheaper to abandon old software and acquire new software that meets rapidly changing needs and demands. What happens to software that is abandoned and what consequences may arise from 'throwaway' culture (Cooper, 2005) are still open questions. This paper will explore the systems engineering concept of end-of-life for software, it will highlight the gaps in existing software engineering practices, it will bring forward examples of software that has been abandoned in an attempt to decommission and it will explore the repercussions of abandoned software artefacts. A proposed way forward for addressing the identified research gaps is also detailed.
AirDOS: Dynamic SLAM benefits from Articulated Objects
Sep 21, 2021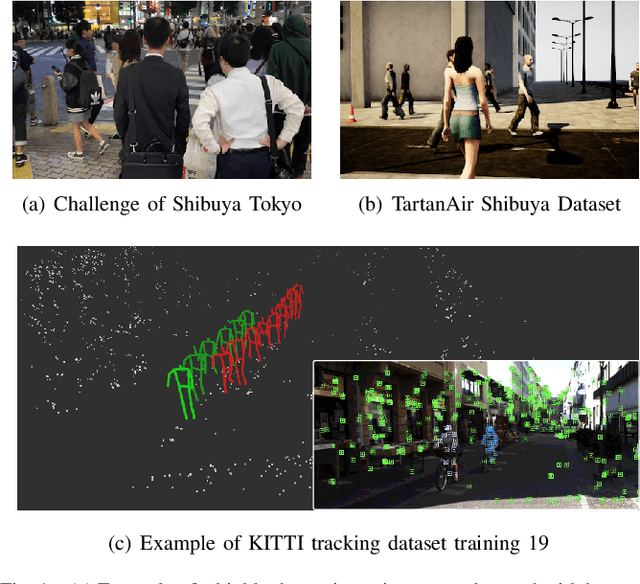
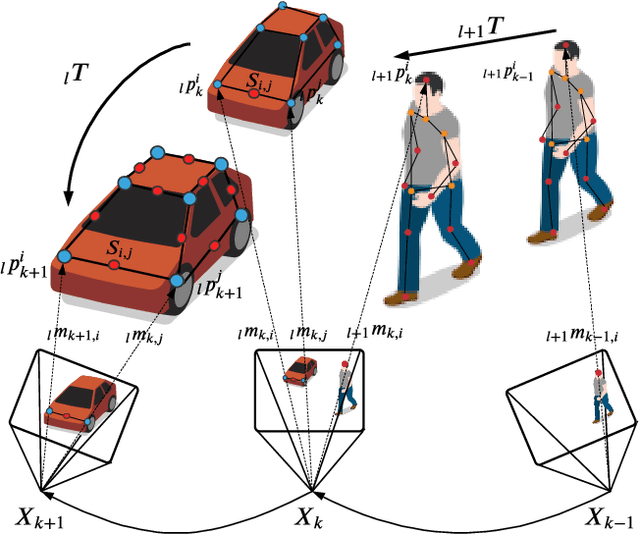


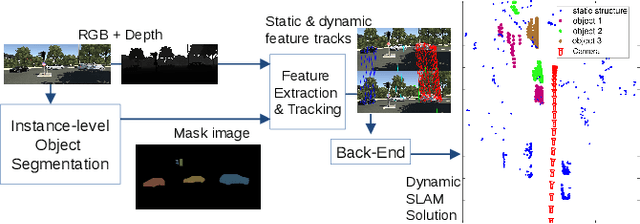
Dynamic Object-aware SLAM (DOS) exploits object-level information to enable robust motion estimation in dynamic environments. It has attracted increasing attention with the recent success of learning-based models. Existing methods mainly focus on identifying and excluding dynamic objects from the optimization. In this paper, we show that feature-based visual SLAM systems can also benefit from the presence of dynamic articulated objects by taking advantage of two observations: (1) The 3D structure of an articulated object remains consistent over time; (2) The points on the same object follow the same motion. In particular, we present AirDOS, a dynamic object-aware system that introduces rigidity and motion constraints to model articulated objects. By jointly optimizing the camera pose, object motion, and the object 3D structure, we can rectify the camera pose estimation, preventing tracking loss, and generate 4D spatio-temporal maps for both dynamic objects and static scenes. Experiments show that our algorithm improves the robustness of visual SLAM algorithms in challenging crowded urban environments. To the best of our knowledge, AirDOS is the first dynamic object-aware SLAM system demonstrating that camera pose estimation can be improved by incorporating dynamic articulated objects.
Robust Ego and Object 6-DoF Motion Estimation and Tracking
Jul 28, 2020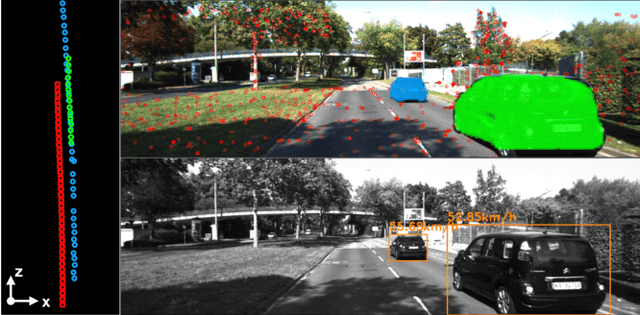

The problem of tracking self-motion as well as motion of objects in the scene using information from a camera is known as multi-body visual odometry and is a challenging task. This paper proposes a robust solution to achieve accurate estimation and consistent track-ability for dynamic multi-body visual odometry. A compact and effective framework is proposed leveraging recent advances in semantic instance-level segmentation and accurate optical flow estimation. A novel formulation, jointly optimizing SE(3) motion and optical flow is introduced that improves the quality of the tracked points and the motion estimation accuracy. The proposed approach is evaluated on the virtual KITTI Dataset and tested on the real KITTI Dataset, demonstrating its applicability to autonomous driving applications. For the benefit of the community, we make the source code public.
VDO-SLAM: A Visual Dynamic Object-aware SLAM System
May 25, 2020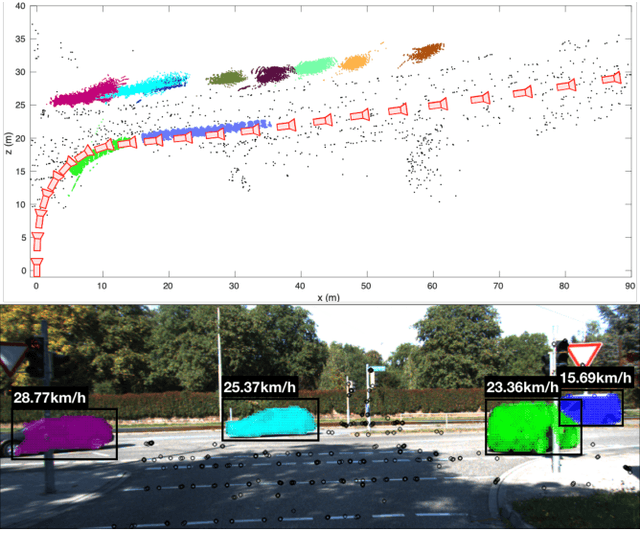
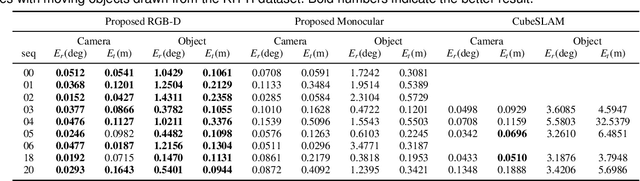
The scene rigidity assumption, also known as the static world assumption, is common in SLAM algorithms. Most existing algorithms operating in complex dynamic environments simplify the problem by removing moving objects from consideration or tracking them separately. Such strong assumptions limit the deployment of autonomous mobile robotic systems in a wide range of important real world applications involving highly dynamic and unstructured environments. This paper presents VDO-SLAM, a robust object-aware dynamic SLAM system that exploits semantic information to enable motion estimation of rigid objects in the scene without any prior knowledge of the objects shape or motion models. The proposed approach integrates dynamic and static structures in the environment into a unified estimation framework resulting in accurate robot pose and spatio-temporal map estimation. We provide a way to extract velocity estimates from object pose change of moving objects in the scene providing an important functionality for navigation in complex dynamic environments. We demonstrate the performance of the proposed system on a number of real indoor and outdoor datasets. Results show consistent and substantial improvements over state-of-the-art algorithms. An open-source version of the source code is available.
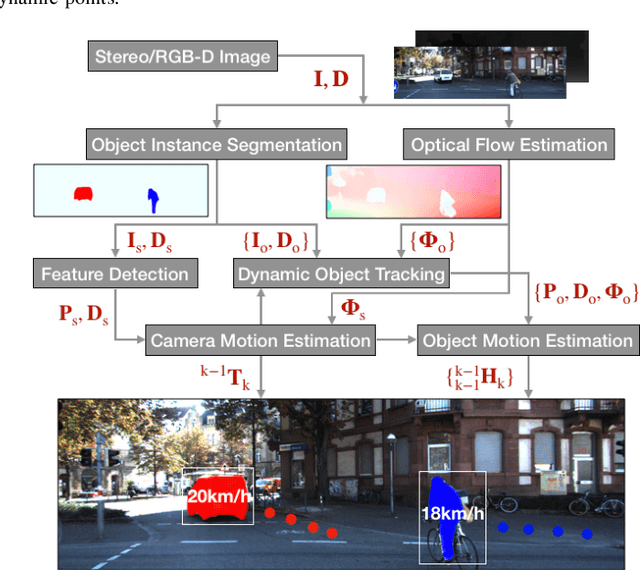
Dynamic SLAM: The Need For Speed
Feb 24, 2020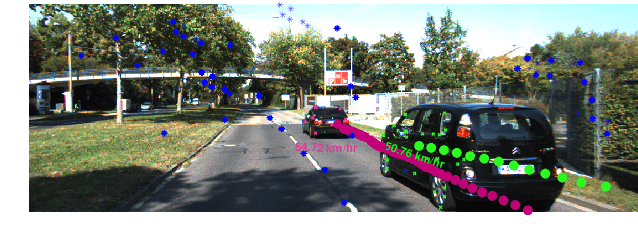
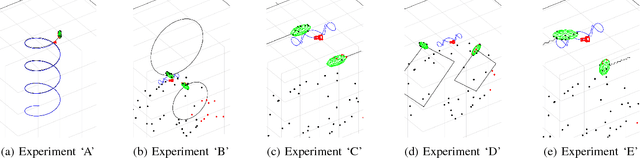
The static world assumption is standard in most simultaneous localisation and mapping (SLAM) algorithms. Increased deployment of autonomous systems to unstructured dynamic environments is driving a need to identify moving objects and estimate their velocity in real-time. Most existing SLAM based approaches rely on a database of 3D models of objects or impose significant motion constraints. In this paper, we propose a new feature-based, model-free, object-aware dynamic SLAM algorithm that exploits semantic segmentation to allow estimation of motion of rigid objects in a scene without the need to estimate the object poses or have any prior knowledge of their 3D models. The algorithm generates a map of dynamic and static structure and has the ability to extract velocities of rigid moving objects in the scene. Its performance is demonstrated on simulated, synthetic and real-world datasets.
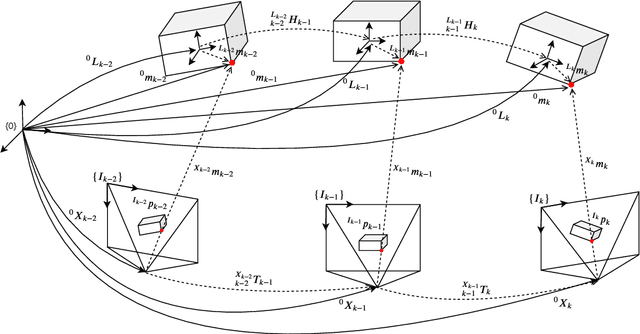
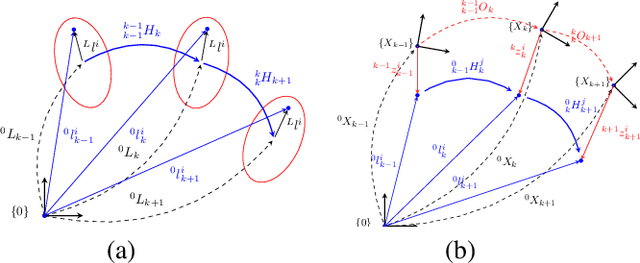
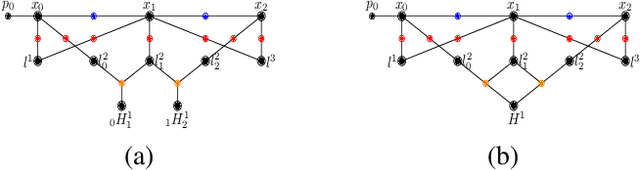
Simultaneous Localization and Mapping with Dynamic Rigid Objects
May 10, 2018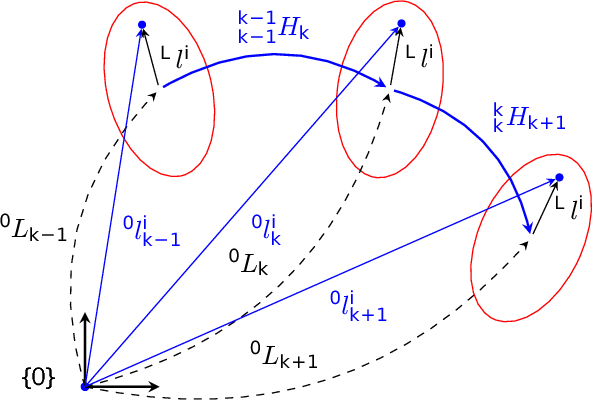

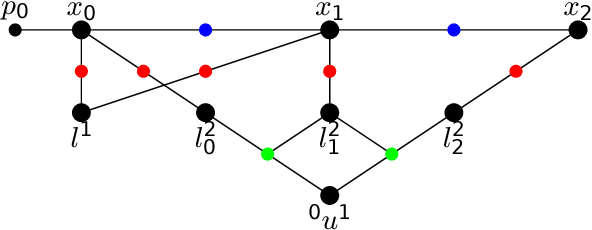
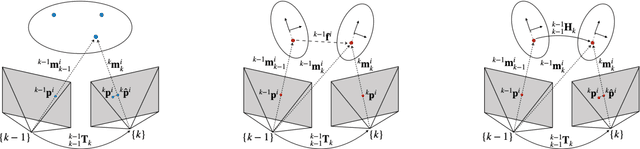
Accurate estimation of the environment structure simultaneously with the robot pose is a key capability of autonomous robotic vehicles. Classical simultaneous localization and mapping (SLAM) algorithms rely on the static world assumption to formulate the estimation problem, however, the real world has a significant amount of dynamics that can be exploited for a more accurate localization and versatile representation of the environment. In this paper we propose a technique to integrate the motion of dynamic objects into the SLAM estimation problem, without the necessity of estimating the pose or the geometry of the objects. To this end, we introduce a novel representation of the pose change of rigid bodies in motion and show the benefits of integrating such information when performing SLAM in dynamic environments. Our experiments show consistent improvement in robot localization and mapping accuracy when using a simple constant motion assumption, even for objects whose motion slightly violates this assumption.