 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Llama 3 Herd of Models
Jul 31, 2024Modern artificial intelligence (AI) systems are powered by foundation models. This paper presents a new set of foundation models, called Llama 3. It is a herd of language models that natively support multilinguality, coding, reasoning, and tool usage. Our largest model is a dense Transformer with 405B parameters and a context window of up to 128K tokens. This paper presents an extensive empirical evaluation of Llama 3. We find that Llama 3 delivers comparable quality to leading language models such as GPT-4 on a plethora of tasks. We publicly release Llama 3, including pre-trained and post-trained versions of the 405B parameter language model and our Llama Guard 3 model for input and output safety. The paper also presents the results of experiments in which we integrate image, video, and speech capabilities into Llama 3 via a compositional approach. We observe this approach performs competitively with the state-of-the-art on image, video, and speech recognition tasks. The resulting models are not yet being broadly released as they are still under development.
Deep Learning based Multi-User Power Allocation and Hybrid Precoding in Massive MIMO Systems
Jan 29, 2022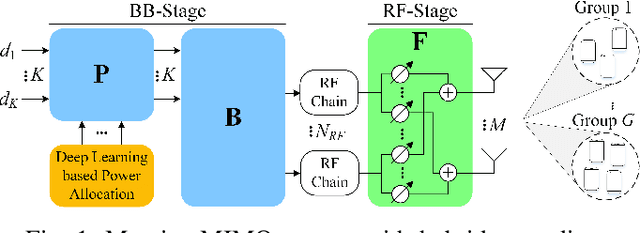
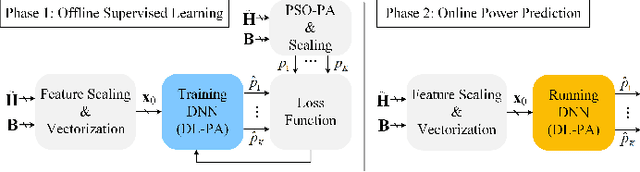
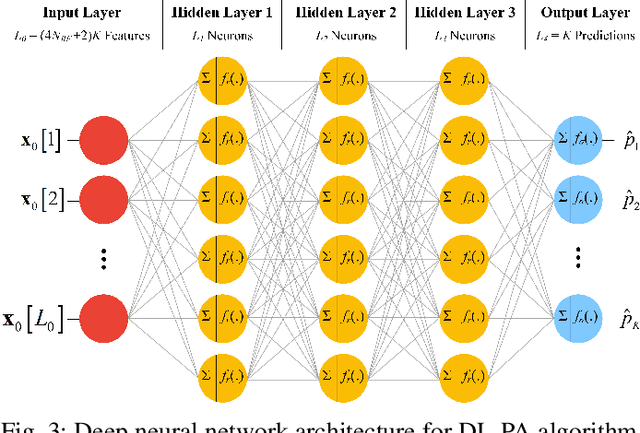
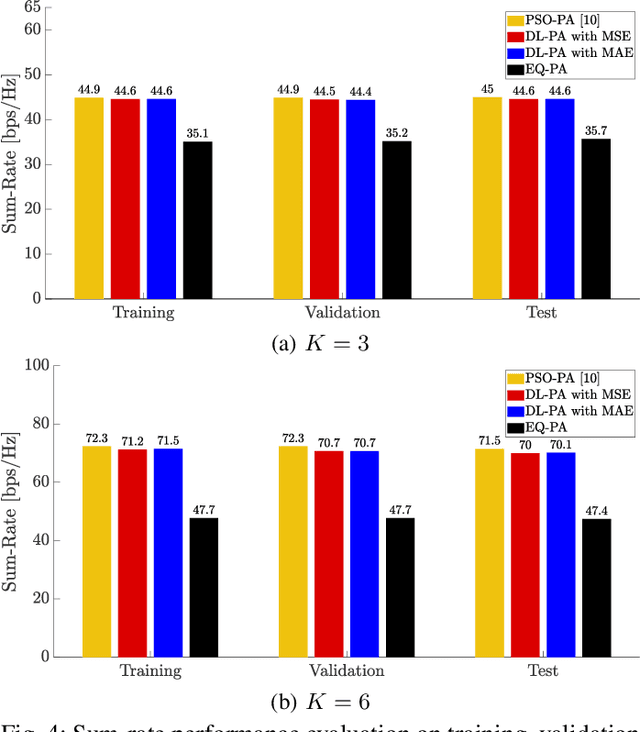
This paper proposes a deep learning based power allocation (DL-PA) and hybrid precoding technique for multiuser massive multiple-input multiple-output (MU-mMIMO) systems. We first utilize an angular-based hybrid precoding technique for reducing the number of RF chains and channel estimation overhead. Then, we develop the DL-PA algorithm via a fully-connected deep neural network (DNN). DL-PA has two phases: (i) offline supervised learning with the optimal allocated powers obtained by particle swarm optimization based PA (PSO-PA) algorithm, (ii) online power prediction by the trained DNN. In comparison to the computationally expensive PSO-PA, it is shown that DL-PA greatly reduces the runtime by 98.6%-99.9%, while closely achieving the optimal sum-rate capacity. It makes DL-PA a promising algorithm for the real-time online applications in MU-mMIMO systems.
Certified Control: An Architecture for Verifiable Safety of Autonomous Vehicles
Mar 29, 2021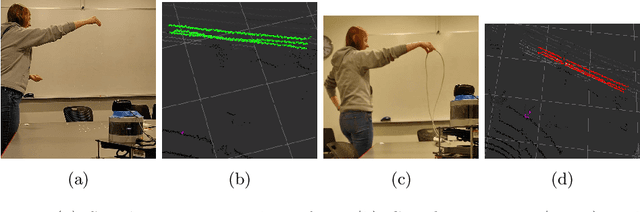
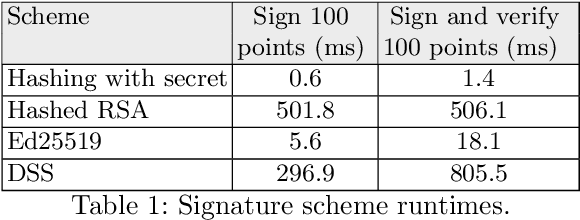
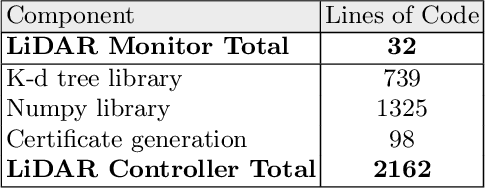

Widespread adoption of autonomous cars will require greater confidence in their safety than is currently possible. Certified control is a new safety architecture whose goal is two-fold: to achieve a very high level of safety, and to provide a framework for justifiable confidence in that safety. The key idea is a runtime monitor that acts, along with sensor hardware and low-level control and actuators, as a small trusted base, ensuring the safety of the system as a whole. Unfortunately, in current systems complex perception makes the verification even of a runtime monitor challenging. Unlike traditional runtime monitoring, therefore, a certified control monitor does not perform perception and analysis itself. Instead, the main controller assembles evidence that the proposed action is safe into a certificate that is then checked independently by the monitor. This exploits the classic gap between the costs of finding and checking. The controller is assigned the task of finding the certificate, and can thus use the most sophisticated algorithms available (including learning-enabled software); the monitor is assigned only the task of checking, and can thus run quickly and be smaller and formally verifiable. This paper explains the key ideas of certified control and illustrates them with a certificate for LiDAR data and its formal verification. It shows how the architecture dramatically reduces the amount of code to be verified, providing an end-to-end safety analysis that would likely not be achievable in a traditional architecture.