 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDifferentiable Rendering: A Survey
Jun 22, 2020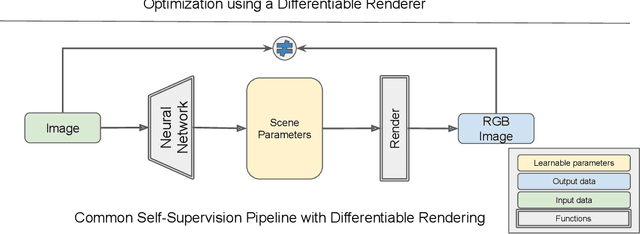
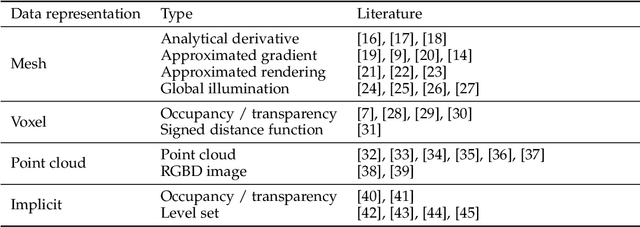
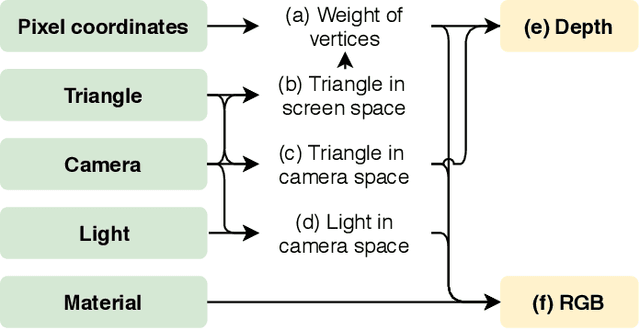

Deep neural networks (DNNs) have shown remarkable performance improvements on vision-related tasks such as object detection or image segmentation. Despite their success, they generally lack the understanding of 3D objects which form the image, as it is not always possible to collect 3D information about the scene or to easily annotate it. Differentiable rendering is a novel field which allows the gradients of 3D objects to be calculated and propagated through images. It also reduces the requirement of 3D data collection and annotation, while enabling higher success rate in various applications. This paper reviews existing literature and discusses the current state of differentiable rendering, its applications and open research problems.
Team Delft's Robot Winner of the Amazon Picking Challenge 2016
Oct 18, 2016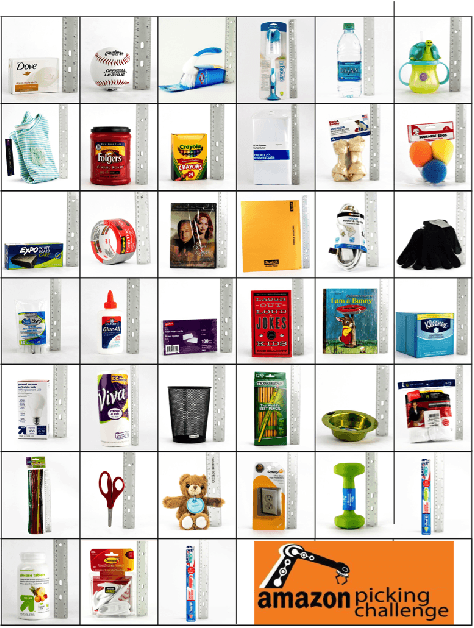
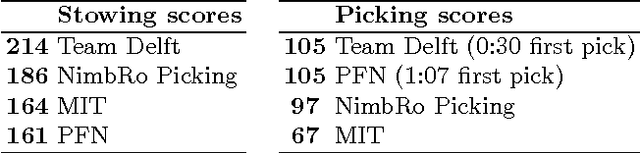
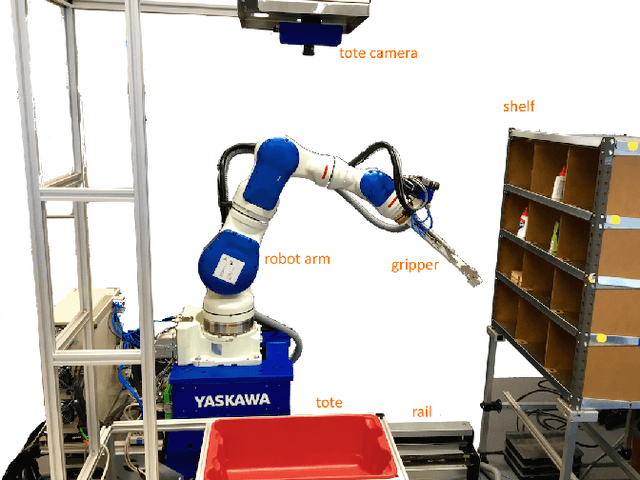
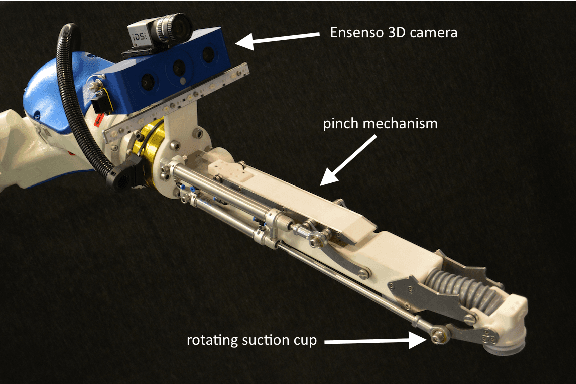
This paper describes Team Delft's robot, which won the Amazon Picking Challenge 2016, including both the Picking and the Stowing competitions. The goal of the challenge is to automate pick and place operations in unstructured environments, specifically the shelves in an Amazon warehouse. Team Delft's robot is based on an industrial robot arm, 3D cameras and a customized gripper. The robot's software uses ROS to integrate off-the-shelf components and modules developed specifically for the competition, implementing Deep Learning and other AI techniques for object recognition and pose estimation, grasp planning and motion planning. This paper describes the main components in the system, and discusses its performance and results at the Amazon Picking Challenge 2016 finals.