 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafe physical HRI: Toward a unified treatment of speed and separation monitoring together with power and force limiting
Aug 08, 2019
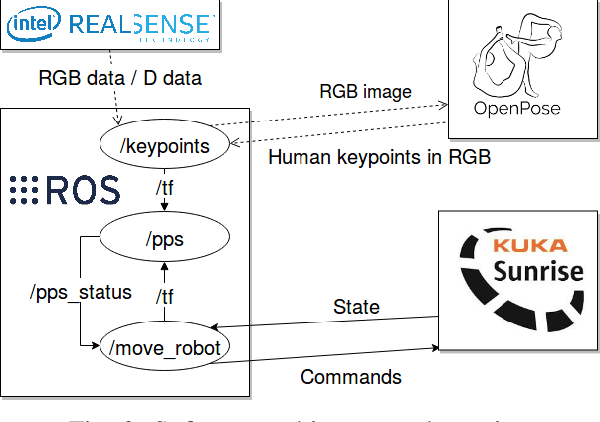
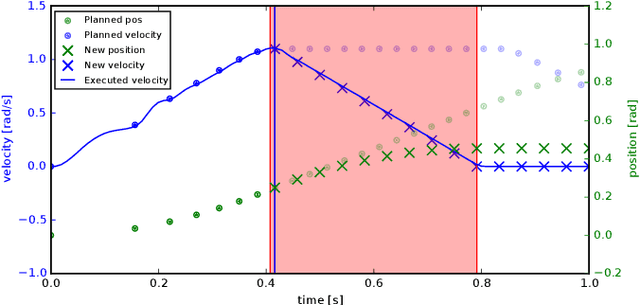
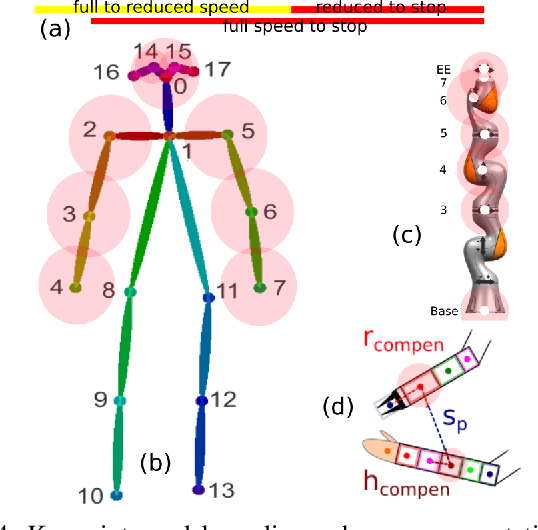
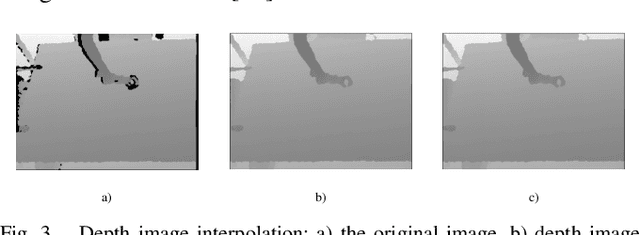
So-called collaborative robots are a current trend in industrial robotics. However, they still face many problems in practical application such as reduced speed to ascertain their collaborativeness. The standards prescribe two regimes: (i) speed and separation monitoring and (ii) power and force limiting, where the former requires reliable estimation of distances between the robot and human body parts and the latter imposes constraints on the energy absorbed during collisions prior to robot stopping. Following the standards, we deploy the two collaborative regimes in a single application and study the performance in a mock collaborative task under the individual regimes, including transitions between them. Additionally, we compare the performance under "safety zone monitoring" with keypoint pair-wise separation distance assessment relying on an RGB-D sensor and skeleton extraction algorithm to track human body parts in the workspace. Best performance has been achieved in the following setting: robot operates at full speed until a distance threshold between any robot and human body part is crossed; then, reduced robot speed per power and force limiting is triggered. Robot is halted only when the operator's head crosses a predefined distance from selected robot parts. We demonstrate our methodology on a setup combining a KUKA LBR iiwa robot, Intel RealSense RGB-D sensor and OpenPose for human pose estimation.
* 8 pages, 6 figures
Teaching robots to imitate a human with no on-teacher sensors. What are the key challenges?
Jan 24, 2019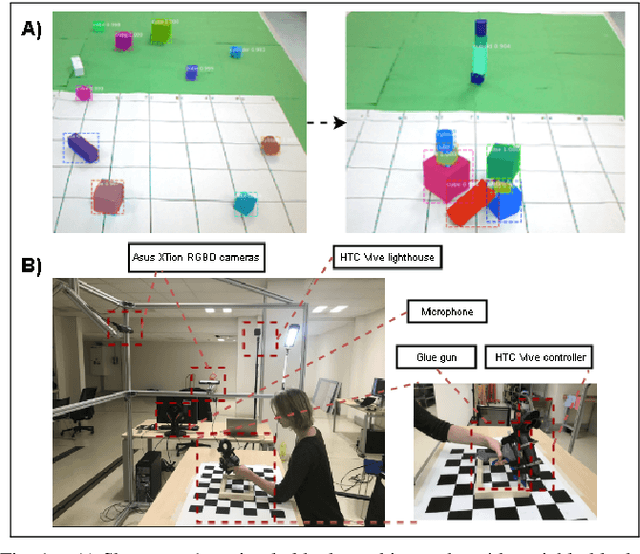

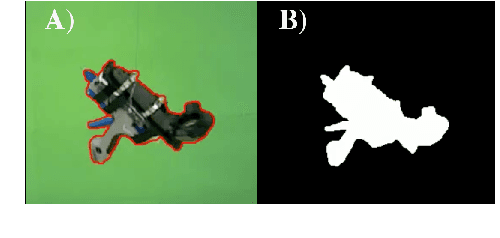
In this paper, we consider the problem of learning object manipulation tasks from human demonstration using RGB or RGB-D cameras. We highlight the key challenges in capturing sufficiently good data with no tracking devices - starting from sensor selection and accurate 6DoF pose estimation to natural language processing. In particular, we focus on two showcases: gluing task with a glue gun and simple block-stacking with variable blocks. Furthermore, we discuss how a linguistic description of the task could help to improve the accuracy of task description. We also present the whole architecture of our transfer of the imitated task to the simulated and real robot environment.