 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInDiReCT: Language-Guided Zero-Shot Deep Metric Learning for Images
Nov 23, 2022Common Deep Metric Learning (DML) datasets specify only one notion of similarity, e.g., two images in the Cars196 dataset are deemed similar if they show the same car model. We argue that depending on the application, users of image retrieval systems have different and changing similarity notions that should be incorporated as easily as possible. Therefore, we present Language-Guided Zero-Shot Deep Metric Learning (LanZ-DML) as a new DML setting in which users control the properties that should be important for image representations without training data by only using natural language. To this end, we propose InDiReCT (Image representations using Dimensionality Reduction on CLIP embedded Texts), a model for LanZ-DML on images that exclusively uses a few text prompts for training. InDiReCT utilizes CLIP as a fixed feature extractor for images and texts and transfers the variation in text prompt embeddings to the image embedding space. Extensive experiments on five datasets and overall thirteen similarity notions show that, despite not seeing any images during training, InDiReCT performs better than strong baselines and approaches the performance of fully-supervised models. An analysis reveals that InDiReCT learns to focus on regions of the image that correlate with the desired similarity notion, which makes it a fast to train and easy to use method to create custom embedding spaces only using natural language.
Semi-unsupervised Learning for Time Series Classification
Jul 13, 2022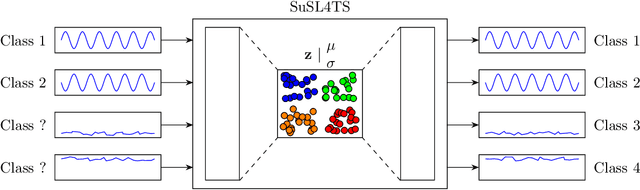

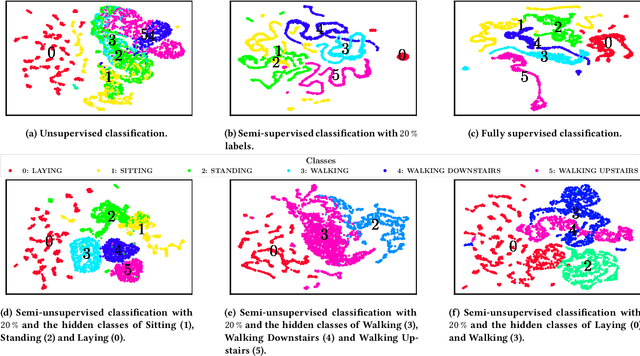
Time series are ubiquitous and therefore inherently hard to analyze and ultimately to label or cluster. With the rise of the Internet of Things (IoT) and its smart devices, data is collected in large amounts any given second. The collected data is rich in information, as one can detect accidents (e.g. cars) in real time, or assess injury/sickness over a given time span (e.g. health devices). Due to its chaotic nature and massive amounts of datapoints, timeseries are hard to label manually. Furthermore new classes within the data could emerge over time (contrary to e.g. handwritten digits), which would require relabeling the data. In this paper we present SuSL4TS, a deep generative Gaussian mixture model for semi-unsupervised learning, to classify time series data. With our approach we can alleviate manual labeling steps, since we can detect sparsely labeled classes (semi-supervised) and identify emerging classes hidden in the data (unsupervised). We demonstrate the efficacy of our approach with established time series classification datasets from different domains.
Do Different Deep Metric Learning Losses Lead to Similar Learned Features?
May 05, 2022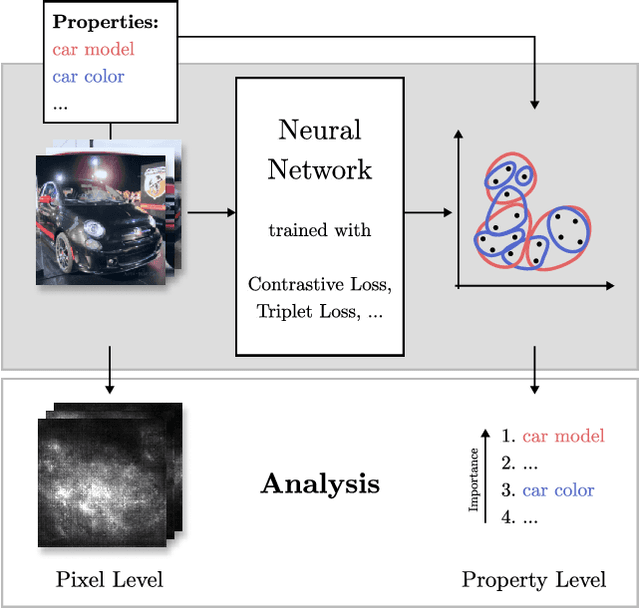
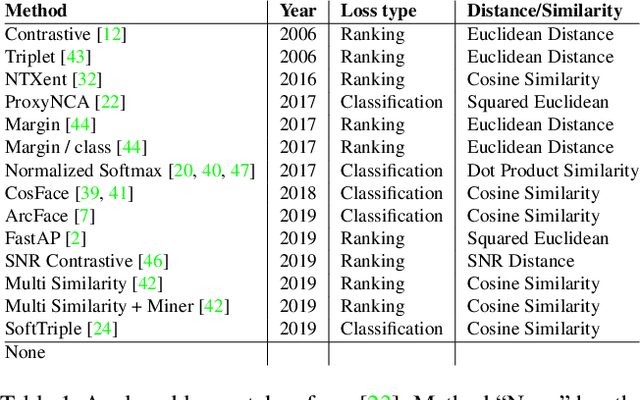
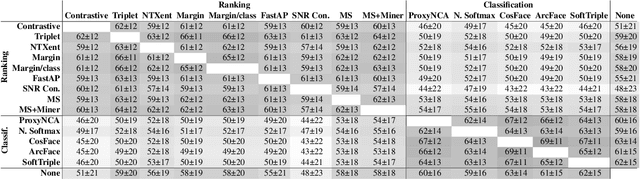
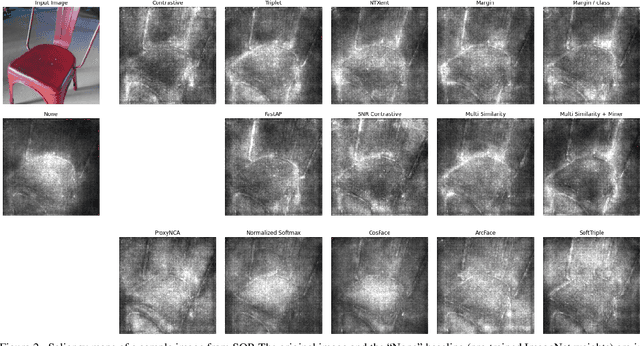
Recent studies have shown that many deep metric learning loss functions perform very similarly under the same experimental conditions. One potential reason for this unexpected result is that all losses let the network focus on similar image regions or properties. In this paper, we investigate this by conducting a two-step analysis to extract and compare the learned visual features of the same model architecture trained with different loss functions: First, we compare the learned features on the pixel level by correlating saliency maps of the same input images. Second, we compare the clustering of embeddings for several image properties, e.g. object color or illumination. To provide independent control over these properties, photo-realistic 3D car renders similar to images in the Cars196 dataset are generated. In our analysis, we compare 14 pretrained models from a recent study and find that, even though all models perform similarly, different loss functions can guide the model to learn different features. We especially find differences between classification and ranking based losses. Our analysis also shows that some seemingly irrelevant properties can have significant influence on the resulting embedding. We encourage researchers from the deep metric learning community to use our methods to get insights into the features learned by their proposed methods.
Anomaly Detection in Beehives: An Algorithm Comparison
Oct 08, 2021
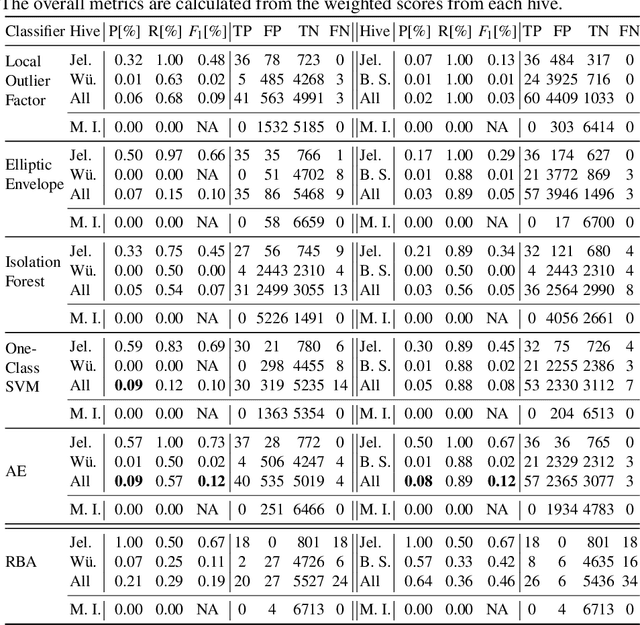
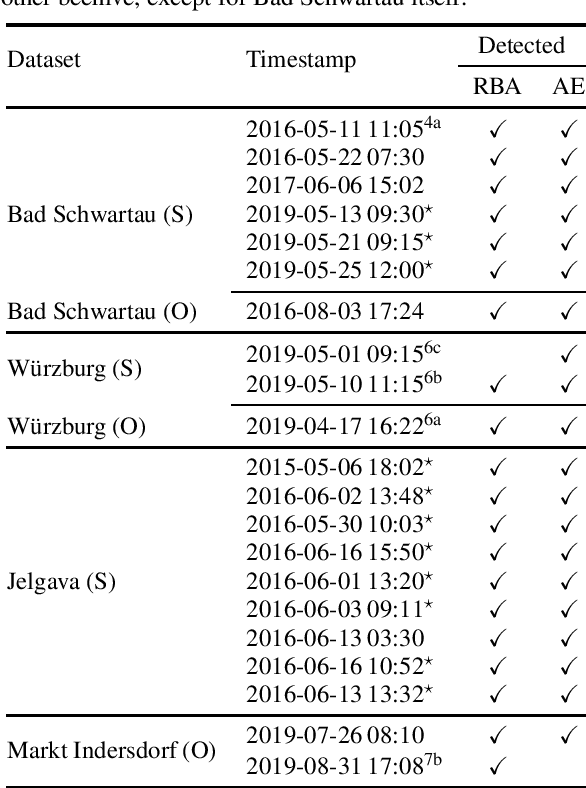
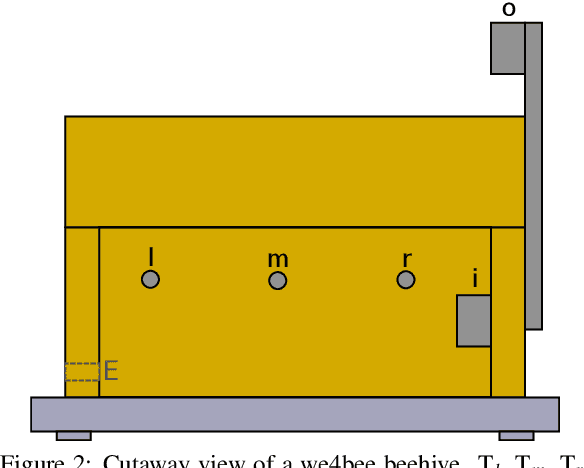
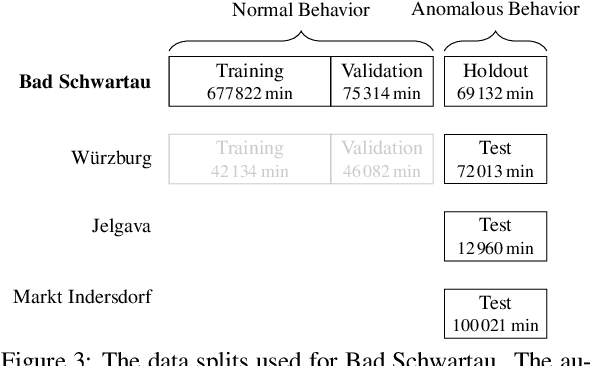
Sensor-equipped beehives allow monitoring the living conditions of bees. Machine learning models can use the data of such hives to learn behavioral patterns and find anomalous events. One type of event that is of particular interest to apiarists for economical reasons is bee swarming. Other events of interest are behavioral anomalies from illness and technical anomalies, e.g. sensor failure. Beekeepers can be supported by suitable machine learning models which can detect these events. In this paper we compare multiple machine learning models for anomaly detection and evaluate them for their applicability in the context of beehives. Namely we employed Deep Recurrent Autoencoder, Elliptic Envelope, Isolation Forest, Local Outlier Factor and One-Class SVM. Through evaluation with real world datasets of different hives and with different sensor setups we find that the autoencoder is the best multi-purpose anomaly detector in comparison.
Deep Learning for Climate Model Output Statistics
Dec 09, 2020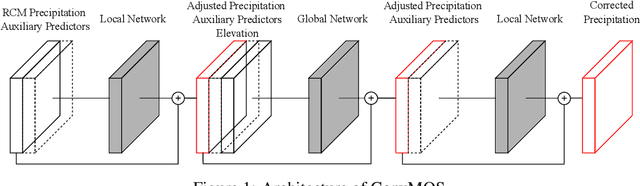
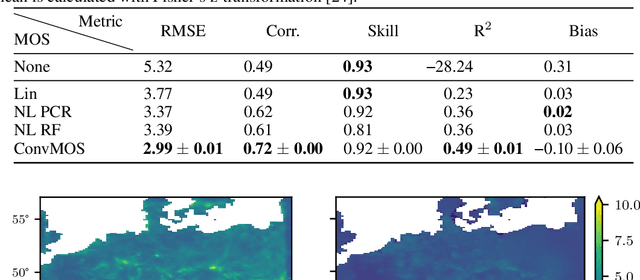
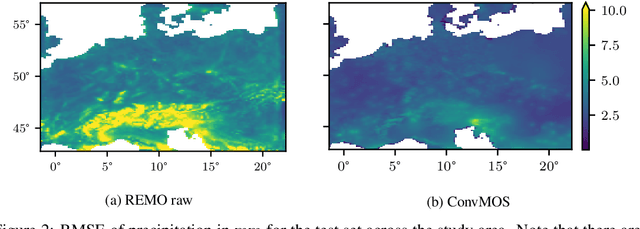
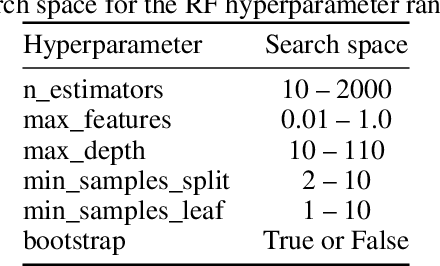
Climate models are an important tool for the assessment of prospective climate change effects but they suffer from systematic and representation errors, especially for precipitation. Model output statistics (MOS) reduce these errors by fitting the model output to observational data with machine learning. In this work, we explore the feasibility and potential of deep learning with convolutional neural networks (CNNs) for MOS. We propose the CNN architecture ConvMOS specifically designed for reducing errors in climate model outputs and apply it to the climate model REMO. Our results show a considerable reduction of errors and mostly improved performance compared to three commonly used MOS approaches.
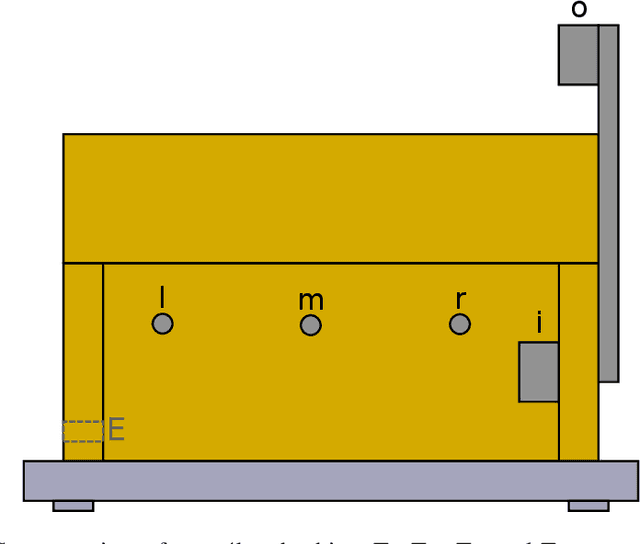
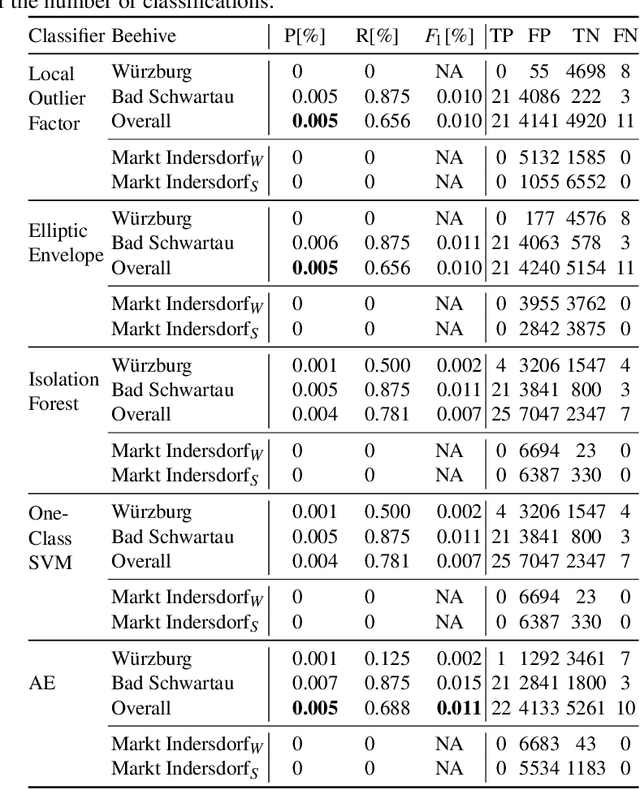
Anomaly Detection in Beehives using Deep Recurrent Autoencoders
Mar 10, 2020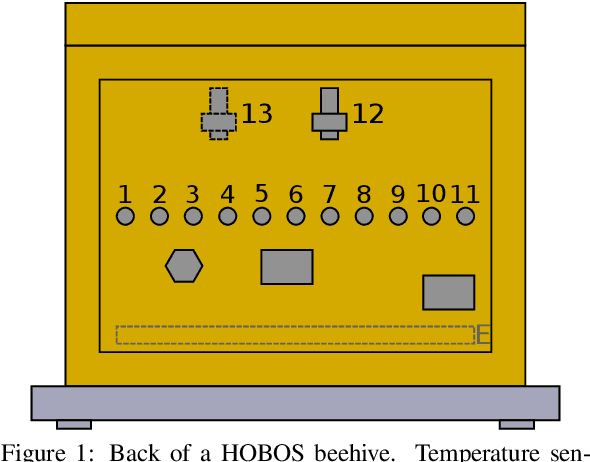
Precision beekeeping allows to monitor bees' living conditions by equipping beehives with sensors. The data recorded by these hives can be analyzed by machine learning models to learn behavioral patterns of or search for unusual events in bee colonies. One typical target is the early detection of bee swarming as apiarists want to avoid this due to economical reasons. Advanced methods should be able to detect any other unusual or abnormal behavior arising from illness of bees or from technical reasons, e.g. sensor failure. In this position paper we present an autoencoder, a deep learning model, which detects any type of anomaly in data independent of its origin. Our model is able to reveal the same swarms as a simple rule-based swarm detection algorithm but is also triggered by any other anomaly. We evaluated our model on real world data sets that were collected on different hives and with different sensor setups.
SimLoss: Class Similarities in Cross Entropy
Mar 06, 2020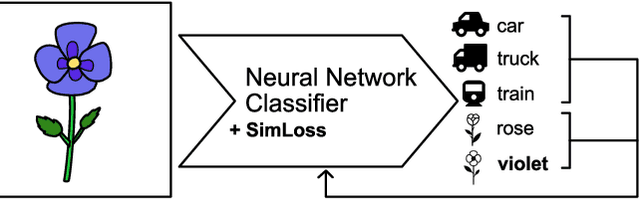
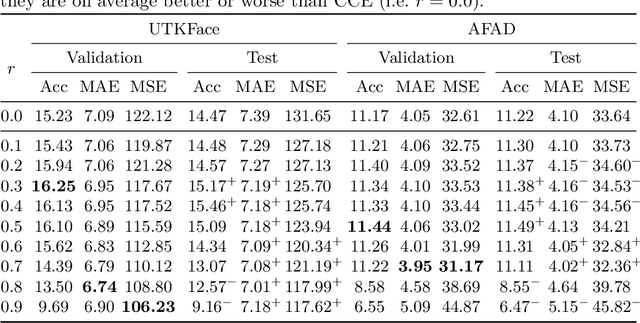
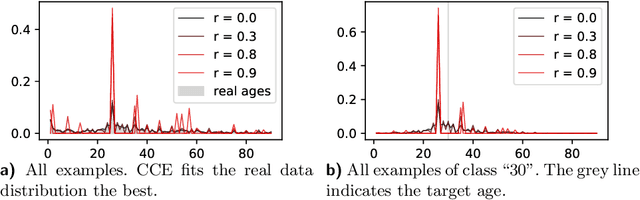
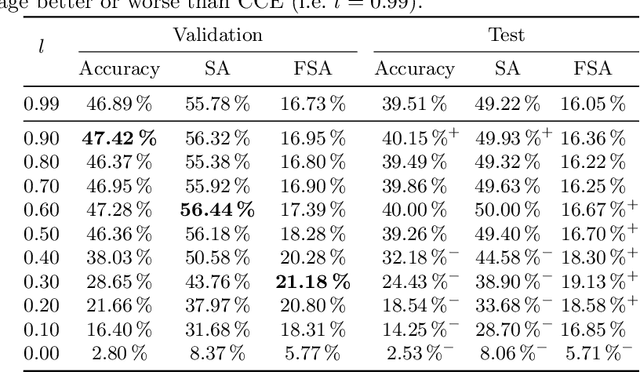
One common loss function in neural network classification tasks is Categorical Cross Entropy (CCE), which punishes all misclassifications equally. However, classes often have an inherent structure. For instance, classifying an image of a rose as "violet" is better than as "truck". We introduce SimLoss, a drop-in replacement for CCE that incorporates class similarities along with two techniques to construct such matrices from task-specific knowledge. We test SimLoss on Age Estimation and Image Classification and find that it brings significant improvements over CCE on several metrics. SimLoss therefore allows for explicit modeling of background knowledge by simply exchanging the loss function, while keeping the neural network architecture the same. Code and additional resources can be found at https://github.com/konstantinkobs/SimLoss.
MapLUR: Exploring a new Paradigm for Estimating Air Pollution using Deep Learning on Map Images
Feb 18, 2020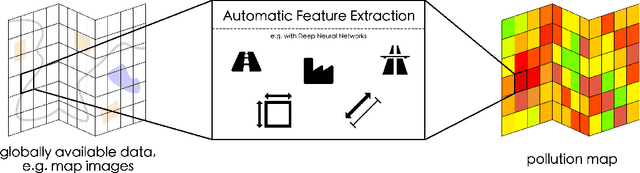
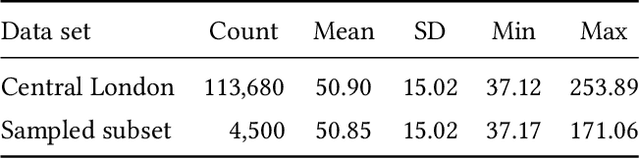
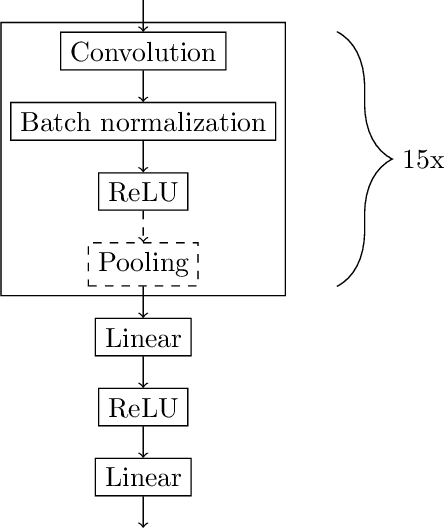

Land-use regression (LUR) models are important for the assessment of air pollution concentrations in areas without measurement stations. While many such models exist, they often use manually constructed features based on restricted, locally available data. Thus, they are typically hard to reproduce and challenging to adapt to areas beyond those they have been developed for. In this paper, we advocate a paradigm shift for LUR models: We propose the Data-driven, Open, Global (DOG) paradigm that entails models based on purely data-driven approaches using only openly and globally available data. Progress within this paradigm will alleviate the need for experts to adapt models to the local characteristics of the available data sources and thus facilitate the generalizability of air pollution models to new areas on a global scale. In order to illustrate the feasibility of the DOG paradigm for LUR, we introduce a deep learning model called MapLUR. It is based on a convolutional neural network architecture and is trained exclusively on globally and openly available map data without requiring manual feature engineering. We compare our model to state-of-the-art baselines like linear regression, random forests and multi-layer perceptrons using a large data set of modeled $\text{NO}_2$ concentrations in Central London. Our results show that MapLUR significantly outperforms these approaches even though they are provided with manually tailored features. Furthermore, we illustrate that the automatic feature extraction inherent to models based on the DOG paradigm can learn features that are readily interpretable and closely resemble those commonly used in traditional LUR approaches.