 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMapLUR: Exploring a new Paradigm for Estimating Air Pollution using Deep Learning on Map Images
Paper and Code
Feb 18, 2020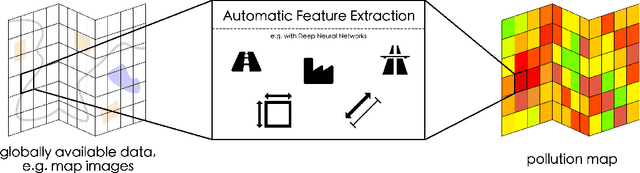
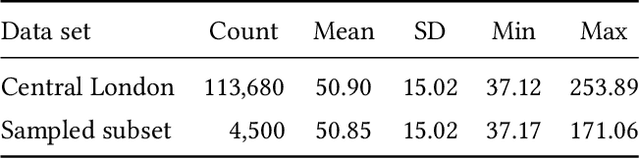
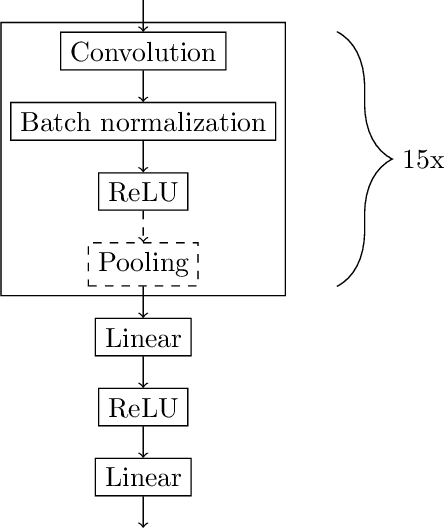

Land-use regression (LUR) models are important for the assessment of air pollution concentrations in areas without measurement stations. While many such models exist, they often use manually constructed features based on restricted, locally available data. Thus, they are typically hard to reproduce and challenging to adapt to areas beyond those they have been developed for. In this paper, we advocate a paradigm shift for LUR models: We propose the Data-driven, Open, Global (DOG) paradigm that entails models based on purely data-driven approaches using only openly and globally available data. Progress within this paradigm will alleviate the need for experts to adapt models to the local characteristics of the available data sources and thus facilitate the generalizability of air pollution models to new areas on a global scale. In order to illustrate the feasibility of the DOG paradigm for LUR, we introduce a deep learning model called MapLUR. It is based on a convolutional neural network architecture and is trained exclusively on globally and openly available map data without requiring manual feature engineering. We compare our model to state-of-the-art baselines like linear regression, random forests and multi-layer perceptrons using a large data set of modeled $\text{NO}_2$ concentrations in Central London. Our results show that MapLUR significantly outperforms these approaches even though they are provided with manually tailored features. Furthermore, we illustrate that the automatic feature extraction inherent to models based on the DOG paradigm can learn features that are readily interpretable and closely resemble those commonly used in traditional LUR approaches.