 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExploring the Effectiveness of Dataset Synthesis: An application of Apple Detection in Orchards
Jun 20, 2023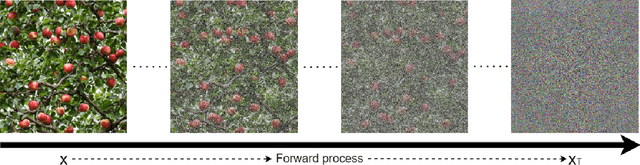
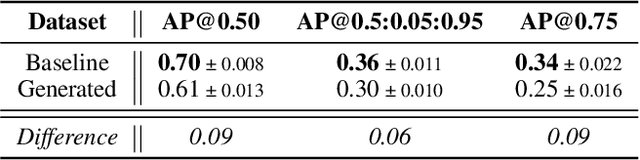
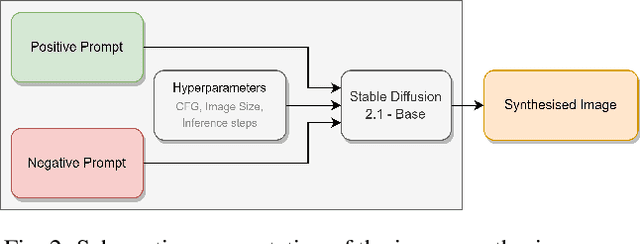
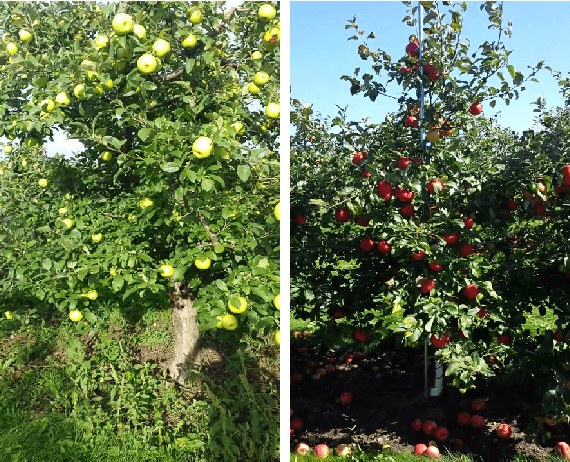
Deep object detection models have achieved notable successes in recent years, but one major obstacle remains: the requirement for a large amount of training data. Obtaining such data is a tedious process and is mainly time consuming, leading to the exploration of new research avenues like synthetic data generation techniques. In this study, we explore the usability of Stable Diffusion 2.1-base for generating synthetic datasets of apple trees for object detection and compare it to a baseline model trained on real-world data. After creating a dataset of realistic apple trees with prompt engineering and utilizing a previously trained Stable Diffusion model, the custom dataset was annotated and evaluated by training a YOLOv5m object detection model to predict apples in a real-world apple detection dataset. YOLOv5m was chosen for its rapid inference time and minimal hardware demands. Results demonstrate that the model trained on generated data is slightly underperforming compared to a baseline model trained on real-world images when evaluated on a set of real-world images. However, these findings remain highly promising, as the average precision difference is only 0.09 and 0.06, respectively. Qualitative results indicate that the model can accurately predict the location of apples, except in cases of heavy shading. These findings illustrate the potential of synthetic data generation techniques as a viable alternative to the collection of extensive training data for object detection models.
The Big Data Myth: Using Diffusion Models for Dataset Generation to Train Deep Detection Models
Jun 16, 2023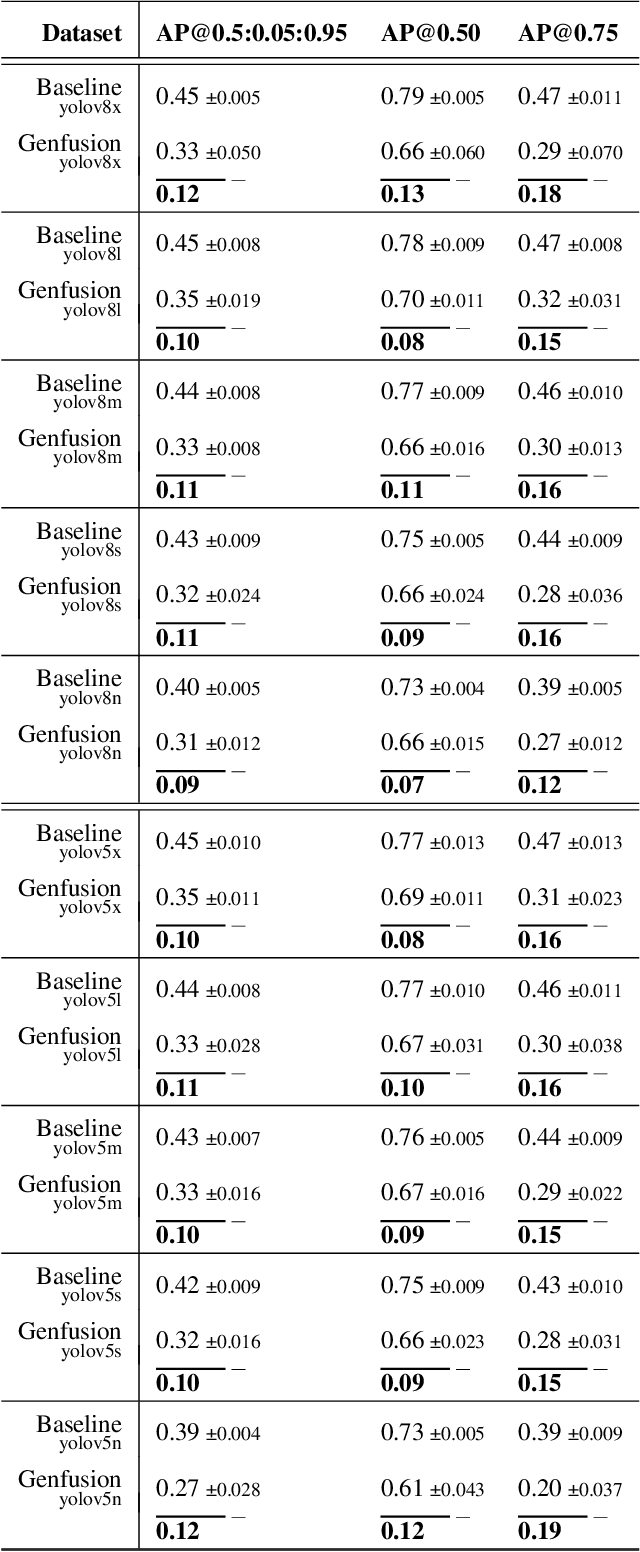
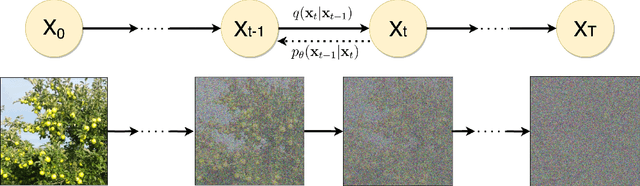
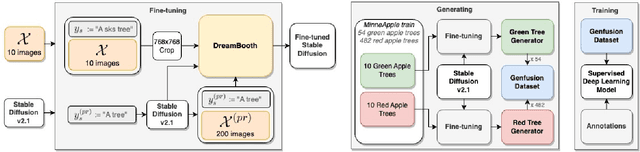
Despite the notable accomplishments of deep object detection models, a major challenge that persists is the requirement for extensive amounts of training data. The process of procuring such real-world data is a laborious undertaking, which has prompted researchers to explore new avenues of research, such as synthetic data generation techniques. This study presents a framework for the generation of synthetic datasets by fine-tuning pretrained stable diffusion models. The synthetic datasets are then manually annotated and employed for training various object detection models. These detectors are evaluated on a real-world test set of 331 images and compared against a baseline model that was trained on real-world images. The results of this study reveal that the object detection models trained on synthetic data perform similarly to the baseline model. In the context of apple detection in orchards, the average precision deviation with the baseline ranges from 0.09 to 0.12. This study illustrates the potential of synthetic data generation techniques as a viable alternative to the collection of extensive training data for the training of deep models.
Crime scene classification from skeletal trajectory analysis in surveillance settings
Jul 04, 2022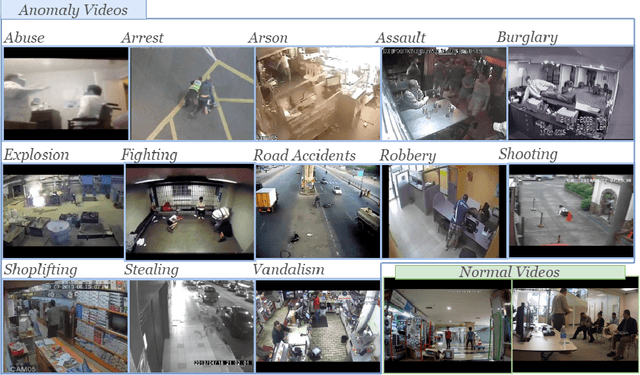
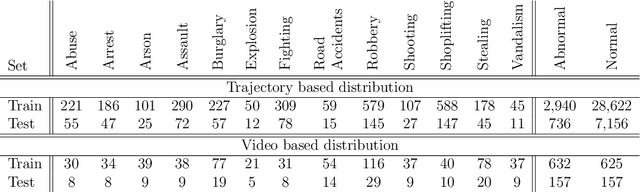
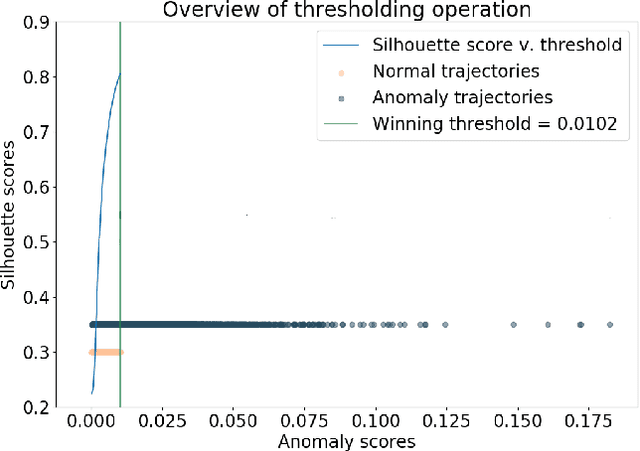
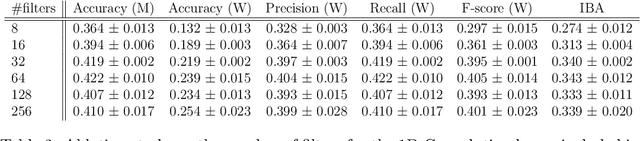
Video anomaly analysis is a core task actively pursued in the field of computer vision, with applications extending to real-world crime detection in surveillance footage. In this work, we address the task of human-related crime classification. In our proposed approach, the human body in video frames, represented as skeletal joints trajectories, is used as the main source of exploration. First, we introduce the significance of extending the ground truth labels for HR-Crime dataset and hence, propose a supervised and unsupervised methodology to generate trajectory-level ground truth labels. Next, given the availability of the trajectory-level ground truth, we introduce a trajectory-based crime classification framework. Ablation studies are conducted with various architectures and feature fusion strategies for the representation of the human trajectories. The conducted experiments demonstrate the feasibility of the task and pave the path for further research in the field.
Hyper-Spectral Imaging for Overlapping Plastic Flakes Segmentation
Mar 23, 2022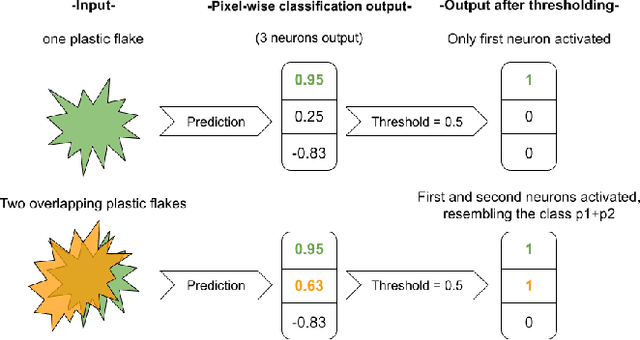
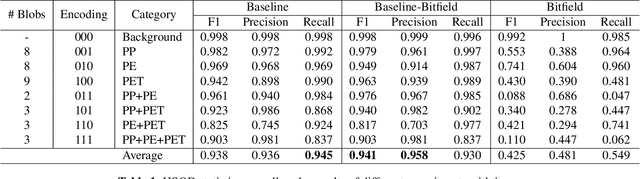
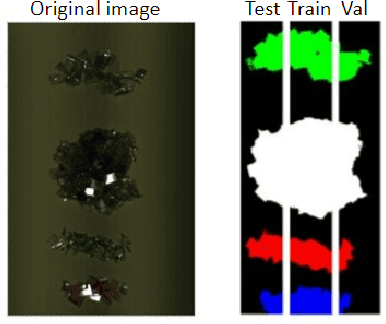
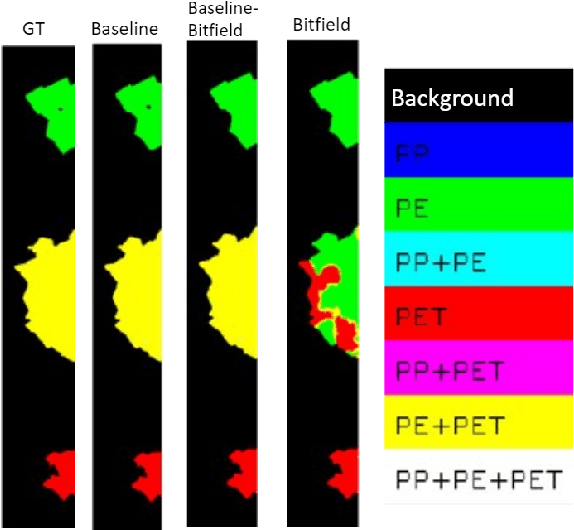
Given the hyper-spectral imaging unique potentials in grasping the polymer characteristics of different materials, it is commonly used in sorting procedures. In a practical plastic sorting scenario, multiple plastic flakes may overlap which depending on their characteristics, the overlap can be reflected in their spectral signature. In this work, we use hyper-spectral imaging for the segmentation of three types of plastic flakes and their possible overlapping combinations. We propose an intuitive and simple multi-label encoding approach, bitfield encoding, to account for the overlapping regions. With our experiments, we show that the bitfield encoding improves over the baseline single-label approach and we further demonstrate its potential in predicting multiple labels for overlapping classes even when the model is only trained with non-overlapping classes.
On the Effect of Pre-Processing and Model Complexity for Plastic Analysis Using Short-Wave-Infrared Hyper-Spectral Imaging
Mar 21, 2022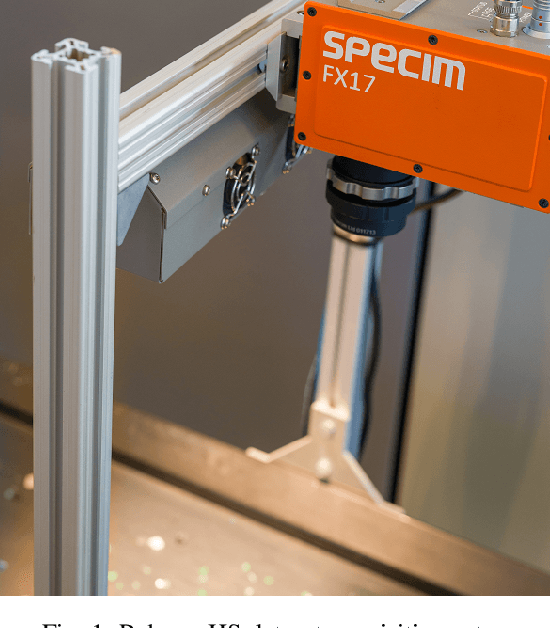

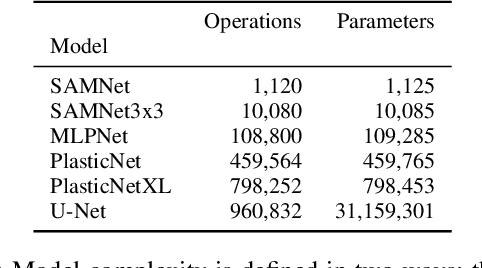
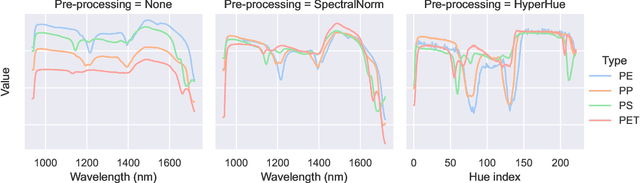
The importance of plastic waste recycling is undeniable. In this respect, computer vision and deep learning enable solutions through the automated analysis of short-wave-infrared hyper-spectral images of plastics. In this paper, we offer an exhaustive empirical study to show the importance of efficient model selection for resolving the task of hyper-spectral image segmentation of various plastic flakes using deep learning. We assess the complexity level of generic and specialized models and infer their performance capacity: generic models are often unnecessarily complex. We introduce two variants of a specialized hyper-spectral architecture, PlasticNet, that outperforms several well-known segmentation architectures in both performance as well as computational complexity. In addition, we shed lights on the significance of signal pre-processing within the realm of hyper-spectral imaging. To complete our contribution, we introduce the largest, most versatile hyper-spectral dataset of plastic flakes of four primary polymer types.
HR-Crime: Human-Related Anomaly Detection in Surveillance Videos
Jul 31, 2021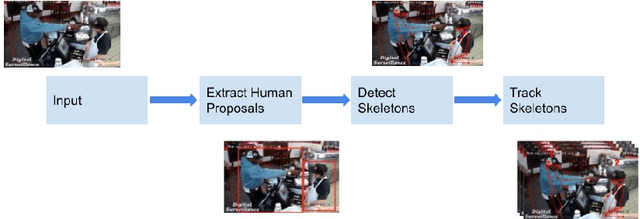
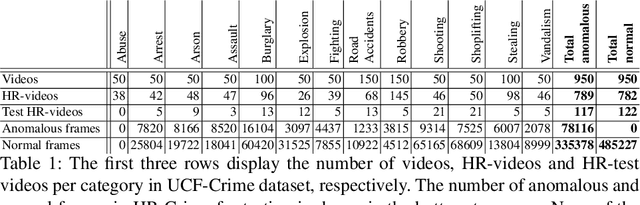
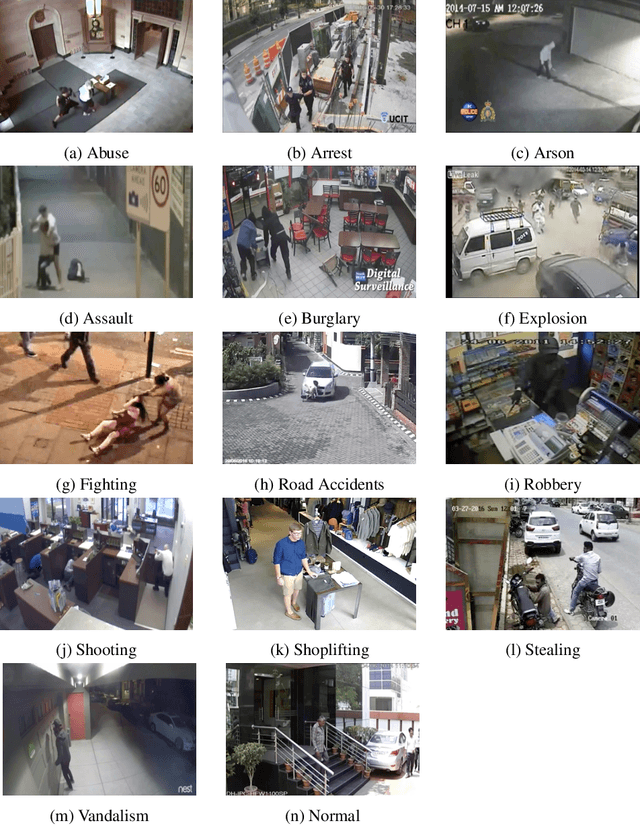
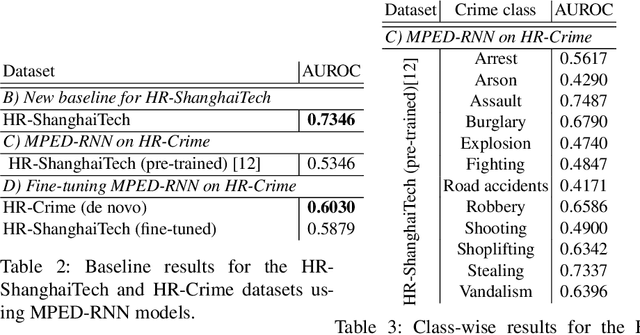
The automatic detection of anomalies captured by surveillance settings is essential for speeding the otherwise laborious approach. To date, UCF-Crime is the largest available dataset for automatic visual analysis of anomalies and consists of real-world crime scenes of various categories. In this paper, we introduce HR-Crime, a subset of the UCF-Crime dataset suitable for human-related anomaly detection tasks. We rely on state-of-the-art techniques to build the feature extraction pipeline for human-related anomaly detection. Furthermore, we present the baseline anomaly detection analysis on the HR-Crime. HR-Crime as well as the developed feature extraction pipeline and the extracted features will be publicly available for further research in the field.
Obstacle Detection for BVLOS Drones
Jun 22, 2021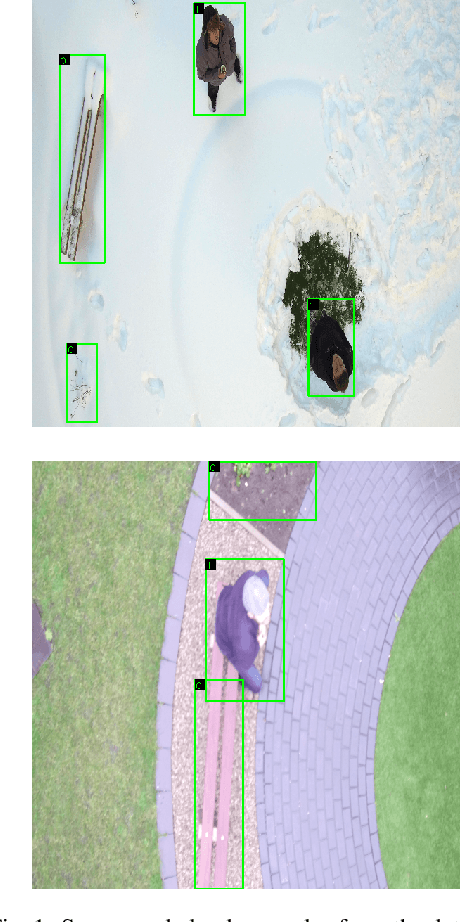
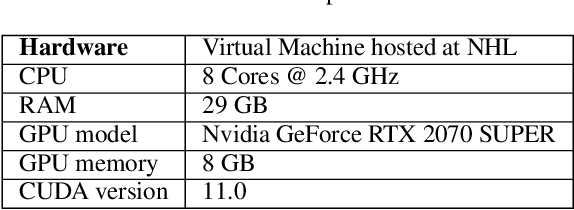
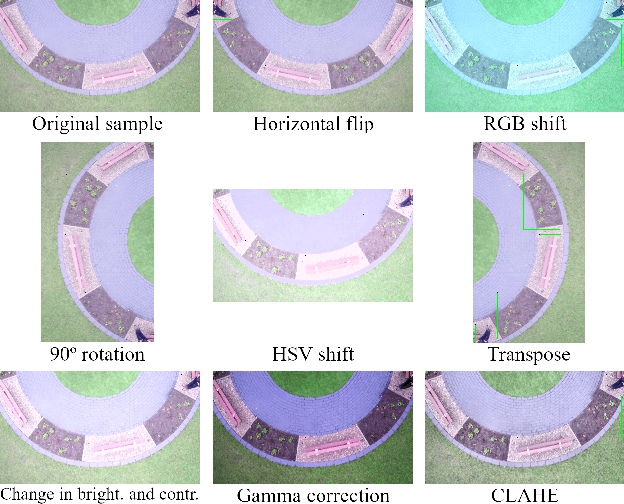
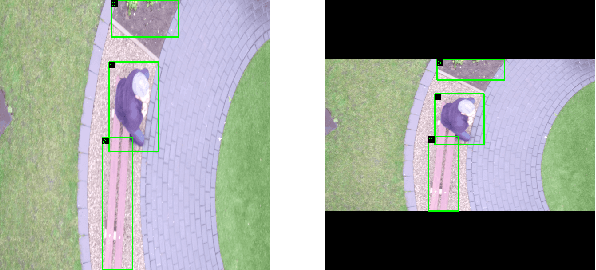
With the introduction of new regulations in the European Union, the future of Beyond Visual Line Of Sight (BVLOS) drones is set to bloom. This led to the creation of the theBEAST project, which aims to create an autonomous security drone, with focus on those regulations and on safety. This technical paper describes the first steps of a module within this project, which revolves around detecting obstacles so they can be avoided in a fail-safe landing. A deep learning powered object detection method is the subject of our research, and various experiments are held to maximize its performance, such as comparing various data augmentation techniques or YOLOv3 and YOLOv5. According to the results of the experiments, we conclude that although object detection is a promising approach to resolve this problem, more volume of data is required for potential usage in a real-life application.
Single Image Human Proxemics Estimation for Visual Social Distancing
Nov 05, 2020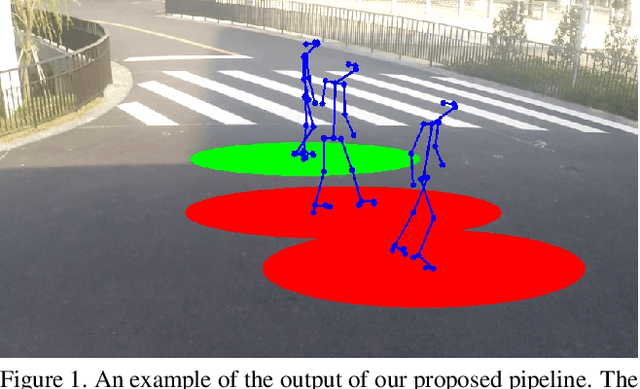
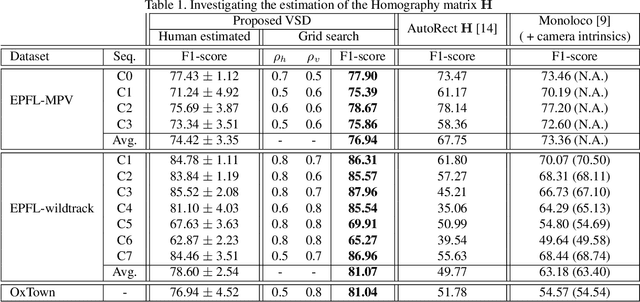
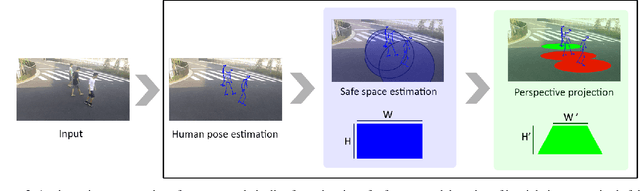
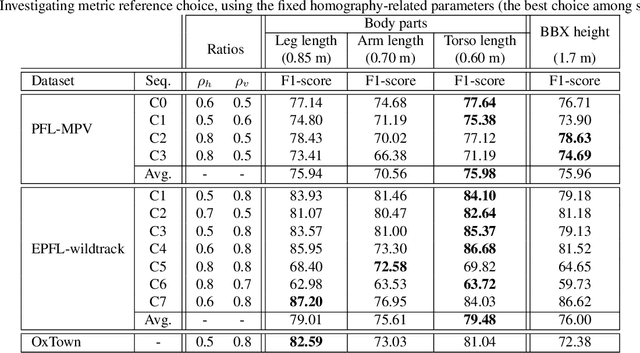
In this work, we address the problem of estimating the so-called "Social Distancing" given a single uncalibrated image in unconstrained scenarios. Our approach proposes a semi-automatic solution to approximate the homography matrix between the scene ground and image plane. With the estimated homography, we then leverage an off-the-shelf pose detector to detect body poses on the image and to reason upon their inter-personal distances using the length of their body-parts. Inter-personal distances are further locally inspected to detect possible violations of the social distancing rules. We validate our proposed method quantitatively and qualitatively against baselines on public domain datasets for which we provided groundtruth on inter-personal distances. Besides, we demonstrate the application of our method deployed in a real testing scenario where statistics on the inter-personal distances are currently used to improve the safety in a critical environment.
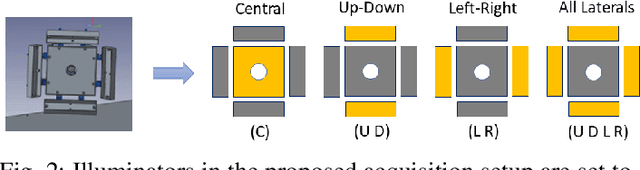
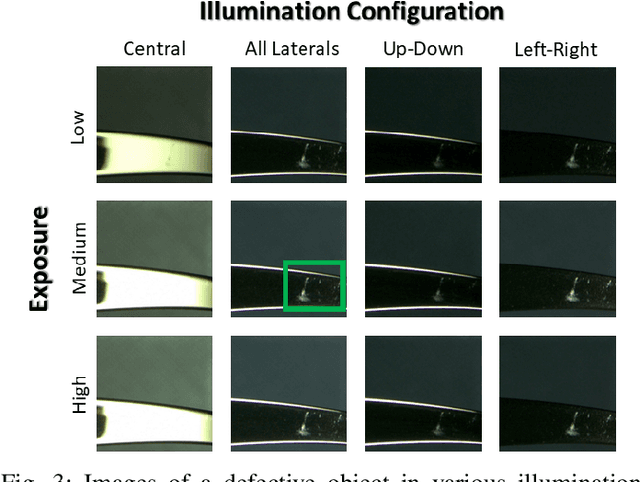
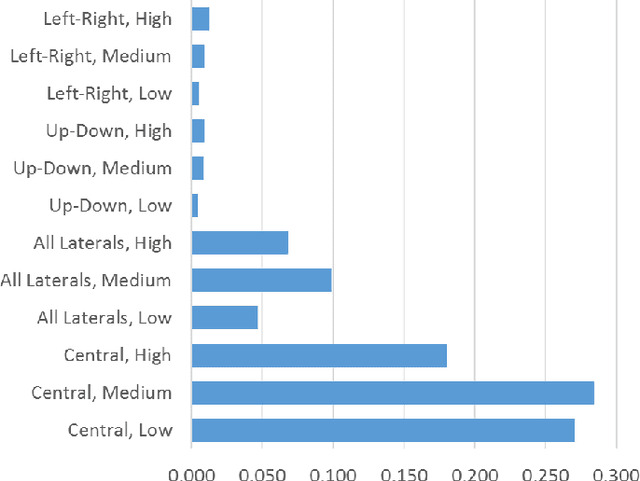
Complex-Object Visual Inspection via Multiple Lighting Configurations
Apr 20, 2020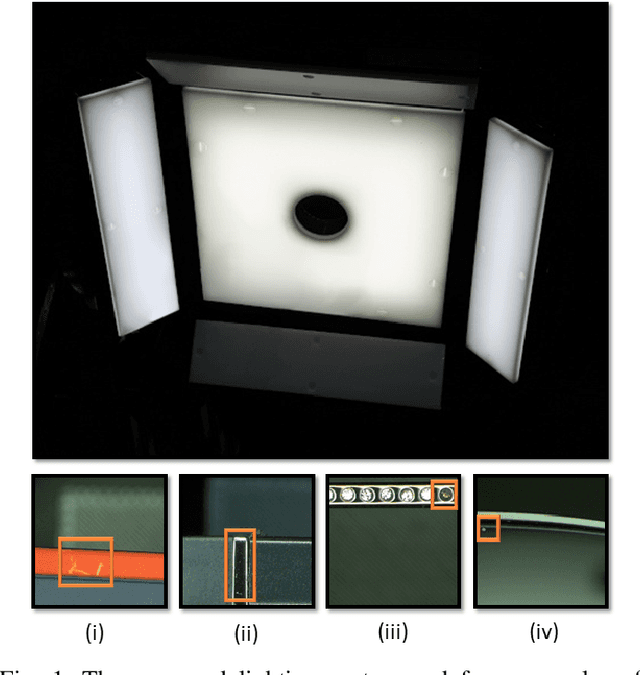
The design of an automatic visual inspection system is usually performed in two stages. While the first stage consists in selecting the most suitable hardware setup for highlighting most effectively the defects on the surface to be inspected, the second stage concerns the development of algorithmic solutions to exploit the potentials offered by the collected data. In this paper, first, we present a novel illumination setup embedding four illumination configurations to resemble diffused, dark-field, and front lighting techniques. Second, we analyze the contributions brought by deploying the proposed setup in training phase only - mimicking the scenario in which an already developed visual inspection system cannot be modified on the customer site - and in evaluation phase. Along with an exhaustive set of experiments, in this paper, we demonstrate the suitability of the proposed setup for effective illumination of complex-objects, defined as manufactured items with variable surface characteristics that cannot be determined a priori. Moreover, we discuss the importance of multiple light configurations availability during training and their natural boosting effect which, without the need to modify the system design in evaluation phase, lead to improvements in the overall system performance.