 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHyper-Spectral Imaging for Overlapping Plastic Flakes Segmentation
Mar 23, 2022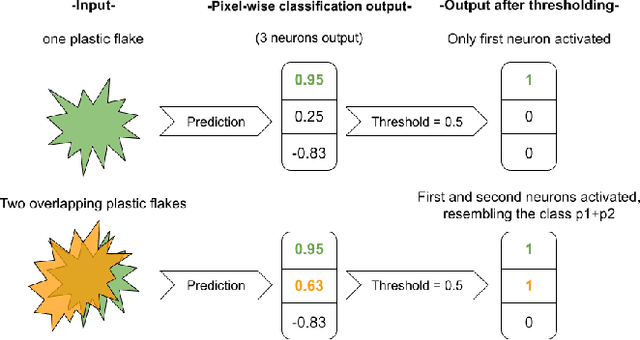
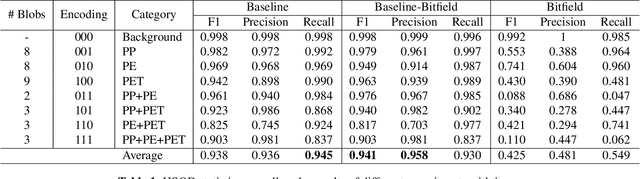
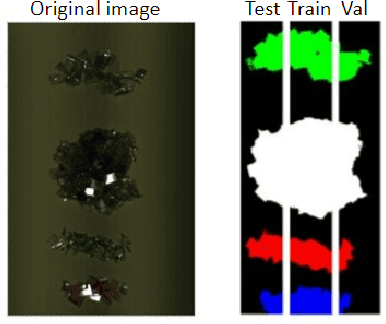
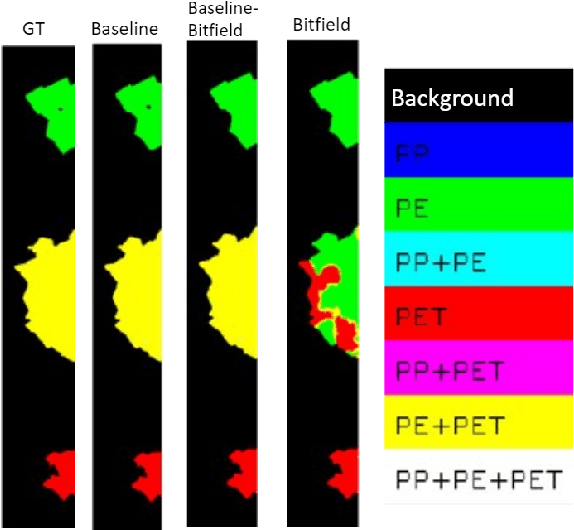
Given the hyper-spectral imaging unique potentials in grasping the polymer characteristics of different materials, it is commonly used in sorting procedures. In a practical plastic sorting scenario, multiple plastic flakes may overlap which depending on their characteristics, the overlap can be reflected in their spectral signature. In this work, we use hyper-spectral imaging for the segmentation of three types of plastic flakes and their possible overlapping combinations. We propose an intuitive and simple multi-label encoding approach, bitfield encoding, to account for the overlapping regions. With our experiments, we show that the bitfield encoding improves over the baseline single-label approach and we further demonstrate its potential in predicting multiple labels for overlapping classes even when the model is only trained with non-overlapping classes.
On the Effect of Pre-Processing and Model Complexity for Plastic Analysis Using Short-Wave-Infrared Hyper-Spectral Imaging
Mar 21, 2022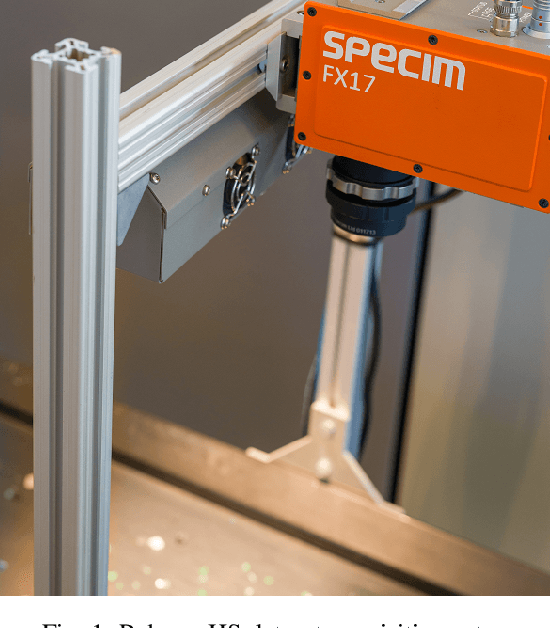

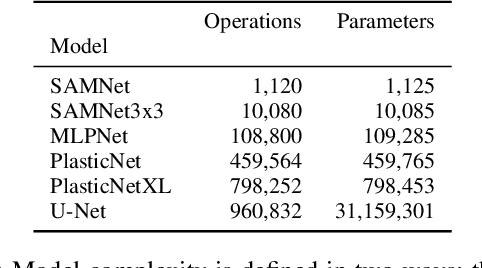
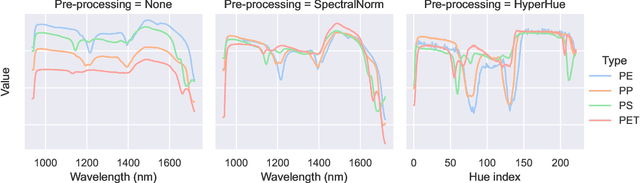
The importance of plastic waste recycling is undeniable. In this respect, computer vision and deep learning enable solutions through the automated analysis of short-wave-infrared hyper-spectral images of plastics. In this paper, we offer an exhaustive empirical study to show the importance of efficient model selection for resolving the task of hyper-spectral image segmentation of various plastic flakes using deep learning. We assess the complexity level of generic and specialized models and infer their performance capacity: generic models are often unnecessarily complex. We introduce two variants of a specialized hyper-spectral architecture, PlasticNet, that outperforms several well-known segmentation architectures in both performance as well as computational complexity. In addition, we shed lights on the significance of signal pre-processing within the realm of hyper-spectral imaging. To complete our contribution, we introduce the largest, most versatile hyper-spectral dataset of plastic flakes of four primary polymer types.
Obstacle Detection for BVLOS Drones
Jun 22, 2021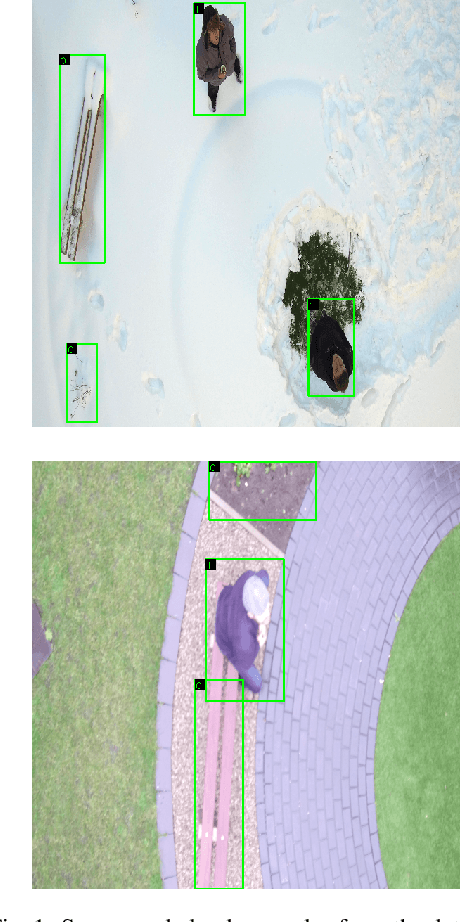
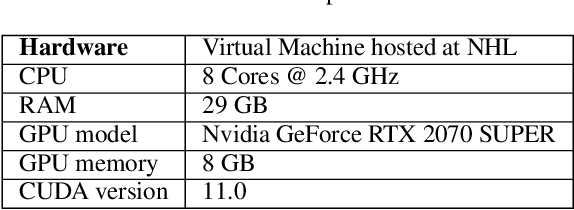
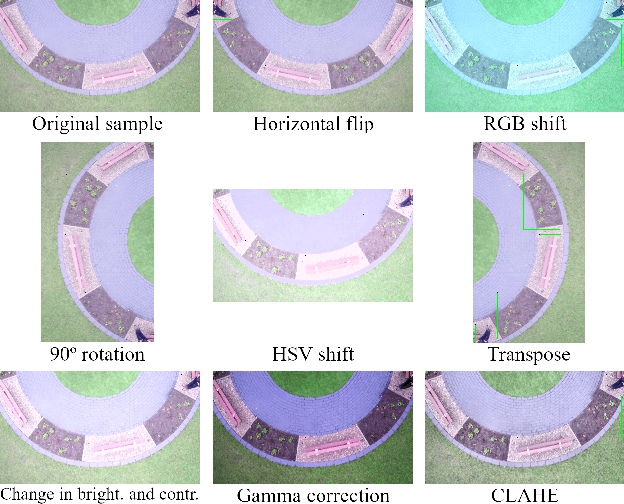
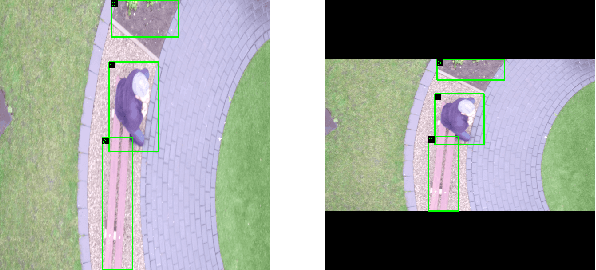
With the introduction of new regulations in the European Union, the future of Beyond Visual Line Of Sight (BVLOS) drones is set to bloom. This led to the creation of the theBEAST project, which aims to create an autonomous security drone, with focus on those regulations and on safety. This technical paper describes the first steps of a module within this project, which revolves around detecting obstacles so they can be avoided in a fail-safe landing. A deep learning powered object detection method is the subject of our research, and various experiments are held to maximize its performance, such as comparing various data augmentation techniques or YOLOv3 and YOLOv5. According to the results of the experiments, we conclude that although object detection is a promising approach to resolve this problem, more volume of data is required for potential usage in a real-life application.