 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSingle Image Human Proxemics Estimation for Visual Social Distancing
Nov 05, 2020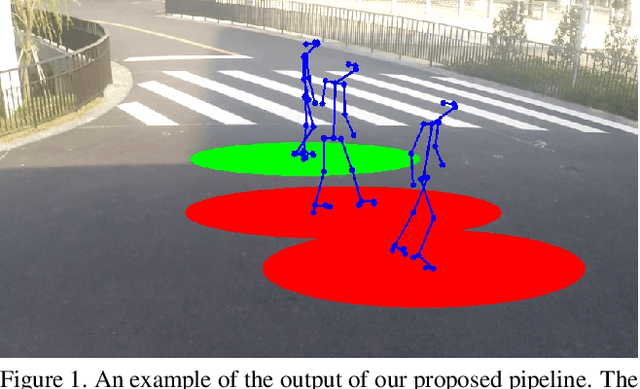
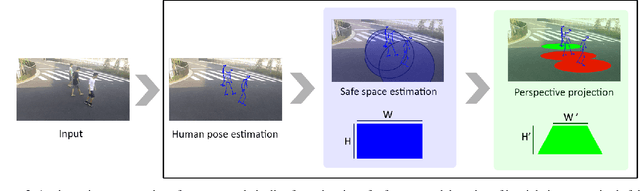
In this work, we address the problem of estimating the so-called "Social Distancing" given a single uncalibrated image in unconstrained scenarios. Our approach proposes a semi-automatic solution to approximate the homography matrix between the scene ground and image plane. With the estimated homography, we then leverage an off-the-shelf pose detector to detect body poses on the image and to reason upon their inter-personal distances using the length of their body-parts. Inter-personal distances are further locally inspected to detect possible violations of the social distancing rules. We validate our proposed method quantitatively and qualitatively against baselines on public domain datasets for which we provided groundtruth on inter-personal distances. Besides, we demonstrate the application of our method deployed in a real testing scenario where statistics on the inter-personal distances are currently used to improve the safety in a critical environment.
A Versatile Crack Inspection Portable System based on Classifier Ensemble and Controlled Illumination
Oct 19, 2020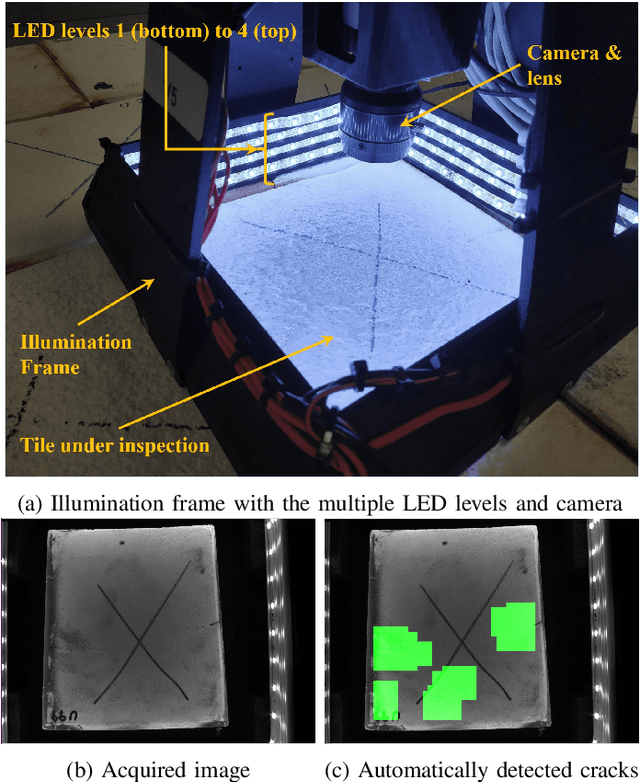

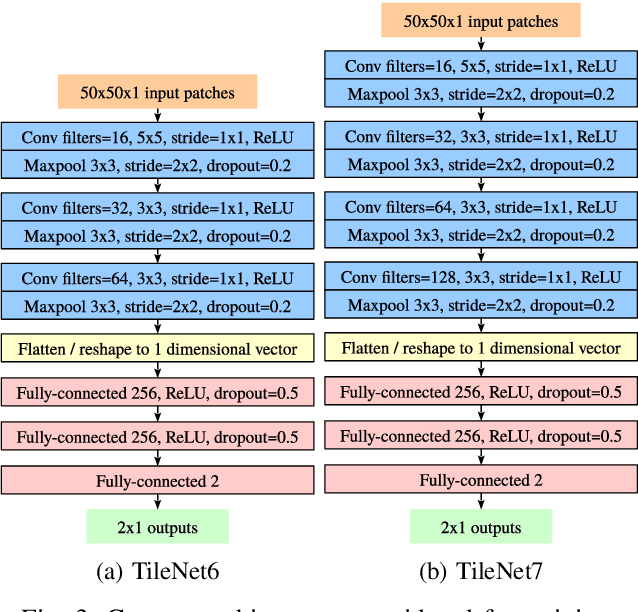
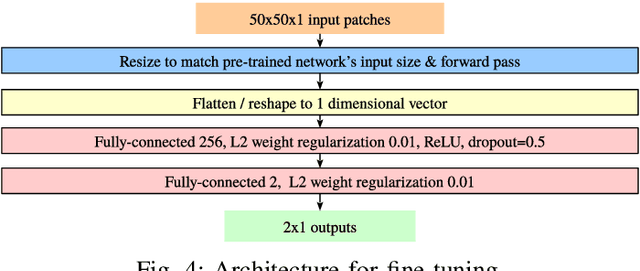
This paper presents a novel setup for automatic visual inspection of cracks in ceramic tile as well as studies the effect of various classifiers and height-varying illumination conditions for this task. The intuition behind this setup is that cracks can be better visualized under specific lighting conditions than others. Our setup, which is designed for field work with constraints in its maximum dimensions, can acquire images for crack detection with multiple lighting conditions using the illumination sources placed at multiple heights. Crack detection is then performed by classifying patches extracted from the acquired images in a sliding window fashion. We study the effect of lights placed at various heights by training classifiers both on customized as well as state-of-the-art architectures and evaluate their performance both at patch-level and image-level, demonstrating the effectiveness of our setup. More importantly, ours is the first study that demonstrates how height-varying illumination conditions can affect crack detection with the use of existing state-of-the-art classifiers. We provide an insight about the illumination conditions that can help in improving crack detection in a challenging real-world industrial environment.
Complex-Object Visual Inspection via Multiple Lighting Configurations
Apr 20, 2020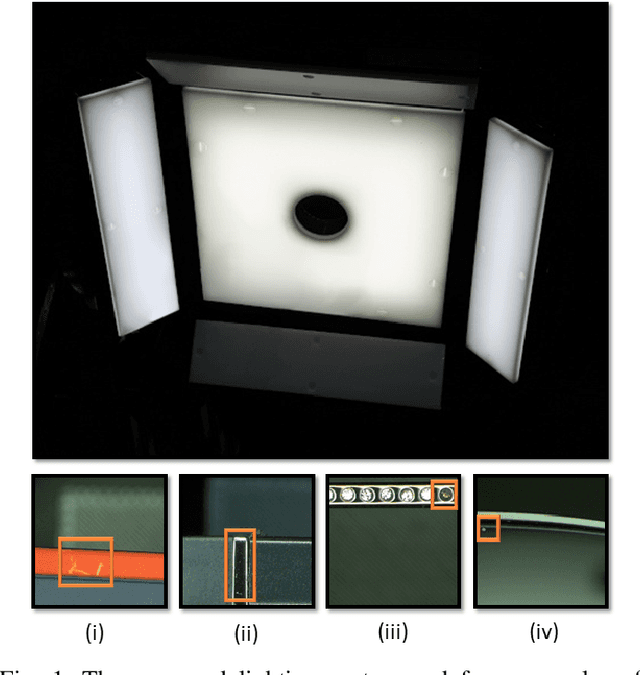
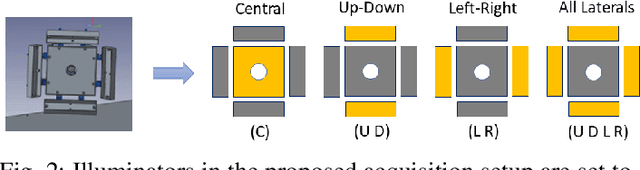
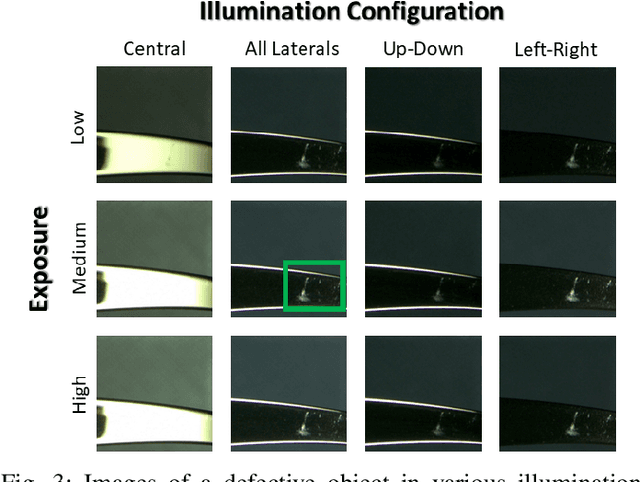
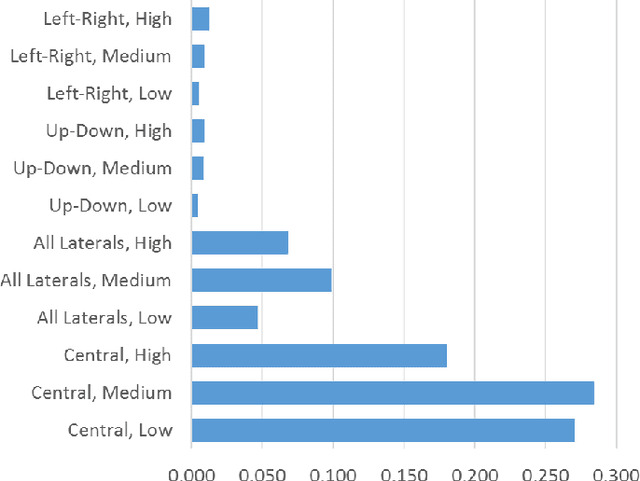
The design of an automatic visual inspection system is usually performed in two stages. While the first stage consists in selecting the most suitable hardware setup for highlighting most effectively the defects on the surface to be inspected, the second stage concerns the development of algorithmic solutions to exploit the potentials offered by the collected data. In this paper, first, we present a novel illumination setup embedding four illumination configurations to resemble diffused, dark-field, and front lighting techniques. Second, we analyze the contributions brought by deploying the proposed setup in training phase only - mimicking the scenario in which an already developed visual inspection system cannot be modified on the customer site - and in evaluation phase. Along with an exhaustive set of experiments, in this paper, we demonstrate the suitability of the proposed setup for effective illumination of complex-objects, defined as manufactured items with variable surface characteristics that cannot be determined a priori. Moreover, we discuss the importance of multiple light configurations availability during training and their natural boosting effect which, without the need to modify the system design in evaluation phase, lead to improvements in the overall system performance.
Weakly Supervised Geodesic Segmentation of Egyptian Mummy CT Scans
Apr 17, 2020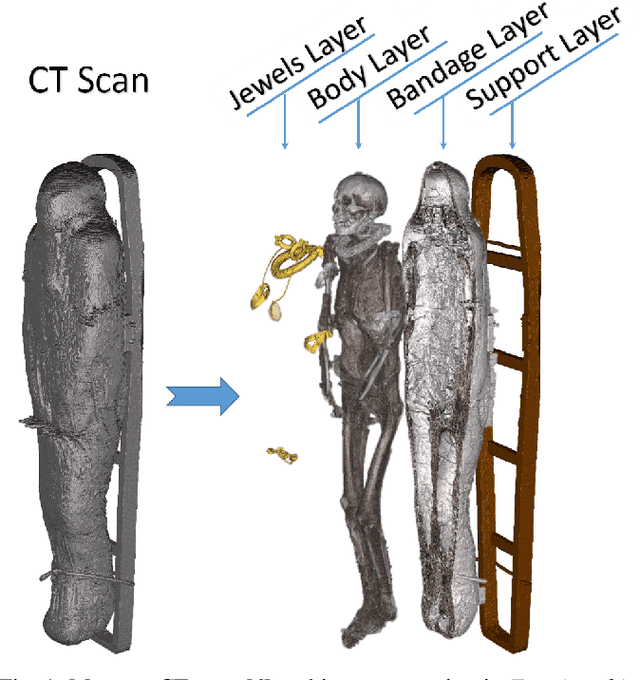
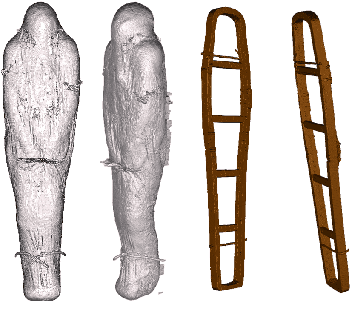
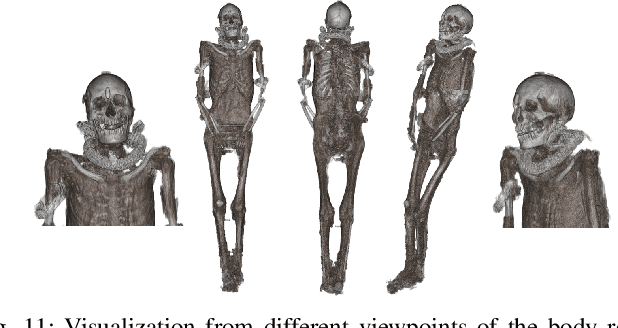
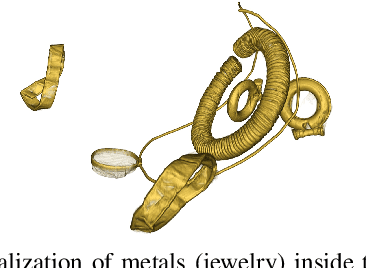
In this paper, we tackle the task of automatically analyzing 3D volumetric scans obtained from computed tomography (CT) devices. In particular, we address a particular task for which data is very limited: the segmentation of ancient Egyptian mummies CT scans. We aim at digitally unwrapping the mummy and identify different segments such as body, bandages and jewelry. The problem is complex because of the lack of annotated data for the different semantic regions to segment, thus discouraging the use of strongly supervised approaches. We, therefore, propose a weakly supervised and efficient interactive segmentation method to solve this challenging problem. After segmenting the wrapped mummy from its exterior region using histogram analysis and template matching, we first design a voxel distance measure to find an approximate solution for the body and bandage segments. Here, we use geodesic distances since voxel features as well as spatial relationship among voxels is incorporated in this measure. Next, we refine the solution using a GrabCut based segmentation together with a tracking method on the slices of the scan that assigns labels to different regions in the volume, using limited supervision in the form of scribbles drawn by the user. The efficiency of the proposed method is demonstrated using visualizations and validated through quantitative measures and qualitative unwrapping of the mummy.