 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeContact-Aware Safety in Soft Robots Using High-Order Control Barrier and Lyapunov Functions
May 05, 2025Robots operating alongside people, particularly in sensitive scenarios such as aiding the elderly with daily tasks or collaborating with workers in manufacturing, must guarantee safety and cultivate user trust. Continuum soft manipulators promise safety through material compliance, but as designs evolve for greater precision, payload capacity, and speed, and increasingly incorporate rigid elements, their injury risk resurfaces. In this letter, we introduce a comprehensive High-Order Control Barrier Function (HOCBF) + High-Order Control Lyapunov Function (HOCLF) framework that enforces strict contact force limits across the entire soft-robot body during environmental interactions. Our approach combines a differentiable Piecewise Cosserat-Segment (PCS) dynamics model with a convex-polygon distance approximation metric, named Differentiable Conservative Separating Axis Theorem (DCSAT), based on the soft robot geometry to enable real-time, whole-body collision detection, resolution, and enforcement of the safety constraints. By embedding HOCBFs into our optimization routine, we guarantee safety and actively regulate environmental coupling, allowing, for instance, safe object manipulation under HOCLF-driven motion objectives. Extensive planar simulations demonstrate that our method maintains safety-bounded contacts while achieving precise shape and task-space regulation. This work thus lays a foundation for the deployment of soft robots in human-centric environments with provable safety and performance.
Learning Low-Dimensional Strain Models of Soft Robots by Looking at the Evolution of Their Shape with Application to Model-Based Control
Oct 31, 2024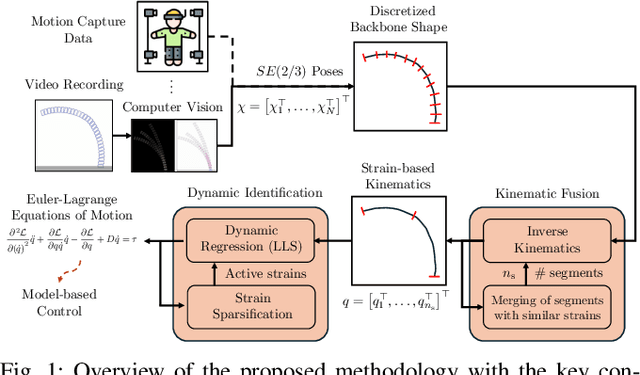
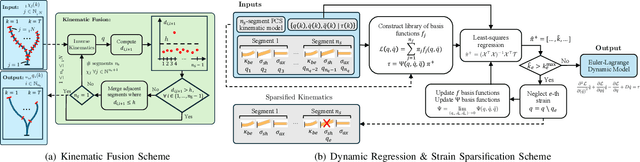
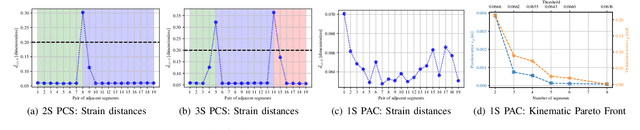
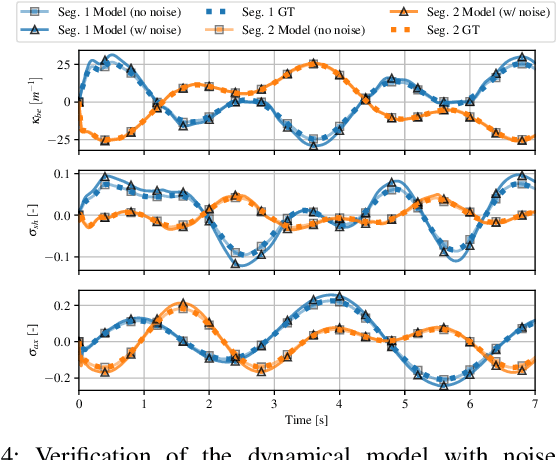
Obtaining dynamic models of continuum soft robots is central to the analysis and control of soft robots, and researchers have devoted much attention to the challenge of proposing both data-driven and first-principle solutions. Both avenues have, however, shown their limitations; the former lacks structure and performs poorly outside training data, while the latter requires significant simplifications and extensive expert knowledge to be used in practice. This paper introduces a streamlined method for learning low-dimensional, physics-based models that are both accurate and easy to interpret. We start with an algorithm that uses image data (i.e., shape evolutions) to determine the minimal necessary segments for describing a soft robot's movement. Following this, we apply a dynamic regression and strain sparsification algorithm to identify relevant strains and define the model's dynamics. We validate our approach through simulations with various planar soft manipulators, comparing its performance against other learning strategies, showing that our models are both computationally efficient and 25x more accurate on out-of-training distribution inputs. Finally, we demonstrate that thanks to the capability of the method of generating physically compatible models, the learned models can be straightforwardly combined with model-based control policies.
Input-to-State Stable Coupled Oscillator Networks for Closed-form Model-based Control in Latent Space
Sep 13, 2024Even though a variety of methods (e.g., RL, MPC, LQR) have been proposed in the literature, efficient and effective latent-space control of physical systems remains an open challenge. A promising avenue would be to leverage powerful and well-understood closed-form strategies from control theory literature in combination with learned dynamics, such as potential-energy shaping. We identify three fundamental shortcomings in existing latent-space models that have so far prevented this powerful combination: (i) they lack the mathematical structure of a physical system, (ii) they do not inherently conserve the stability properties of the real systems. Furthermore, (iii) these methods do not have an invertible mapping between input and latent-space forcing. This work proposes a novel Coupled Oscillator Network (CON) model that simultaneously tackles all these issues. More specifically, (i) we show analytically that CON is a Lagrangian system - i.e., it presses well-defined potential and kinetic energy terms. Then, (ii) we provide formal proof of global Input-to-State stability using Lyapunov arguments. Moving to the experimental side, (iii) we demonstrate that CON reaches SoA performance when learning complex nonlinear dynamics of mechanical systems directly from images. An additional methodological innovation contributing to achieving this third goal is an approximated closed-form solution for efficient integration of network dynamics, which eases efficient training. We tackle (iv) by approximating the forcing-to-input mapping with a decoder that is trained to reconstruct the input based on the encoded latent space force. Finally, we leverage these four properties and show that they enable latent-space control. We use an integral-saturated PID with potential force compensation and demonstrate high-quality performance on a soft robot using raw pixels as the only feedback information.
Guiding Soft Robots with Motor-Imagery Brain Signals and Impedance Control
Jan 24, 2024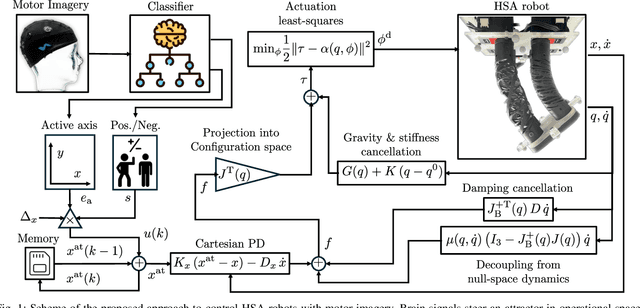
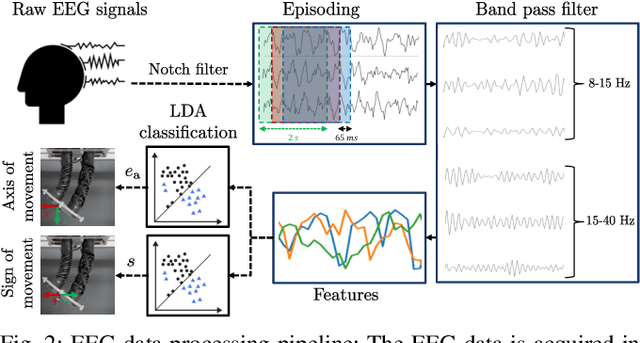
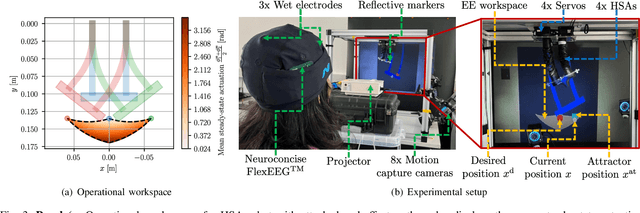
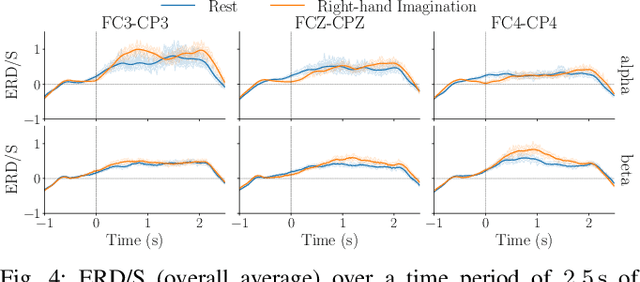
Integrating Brain-Machine Interfaces into non-clinical applications like robot motion control remains difficult - despite remarkable advancements in clinical settings. Specifically, EEG-based motor imagery systems are still error-prone, posing safety risks when rigid robots operate near humans. This work presents an alternative pathway towards safe and effective operation by combining wearable EEG with physically embodied safety in soft robots. We introduce and test a pipeline that allows a user to move a soft robot's end effector in real time via brain waves that are measured by as few as three EEG channels. A robust motor imagery algorithm interprets the user's intentions to move the position of a virtual attractor to which the end effector is attracted, thanks to a new Cartesian impedance controller. We specifically focus here on planar soft robot-based architected metamaterials, which require the development of a novel control architecture to deal with the peculiar nonlinearities - e.g., non-affinity in control. We preliminarily but quantitatively evaluate the approach on the task of setpoint regulation. We observe that the user reaches the proximity of the setpoint in 66% of steps and that for successful steps, the average response time is 21.5s. We also demonstrate the execution of simple real-world tasks involving interaction with the environment, which would be extremely hard to perform if it were not for the robot's softness.
An Experimental Study of Model-based Control for Planar Handed Shearing Auxetics Robots
Oct 21, 2023Parallel robots based on Handed Shearing Auxetics (HSAs) can implement complex motions using standard electric motors while maintaining the complete softness of the structure, thanks to specifically designed architected metamaterials. However, their control is especially challenging due to varying and coupled stiffness, shearing, non-affine terms in the actuation model, and underactuation. In this paper, we present a model-based control strategy for planar HSA robots enabling regulation in task space. We formulate equations of motion, show that they admit a collocated form, and design a P-satI-D feedback controller with compensation for elastic and gravitational forces. We experimentally identify and verify the proposed control strategy in closed loop.
Solving Occlusion in Terrain Mapping with Neural Networks
Sep 15, 2021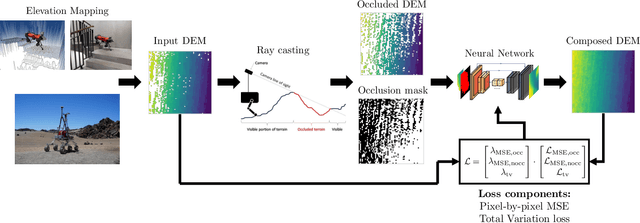
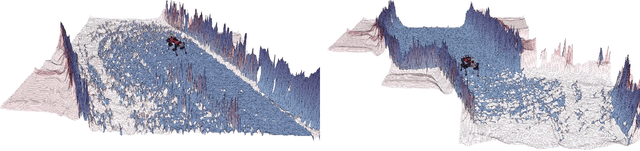
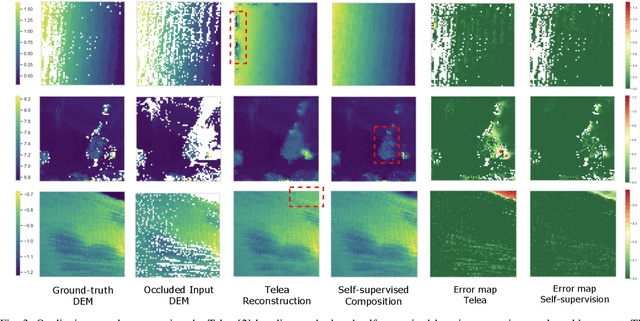
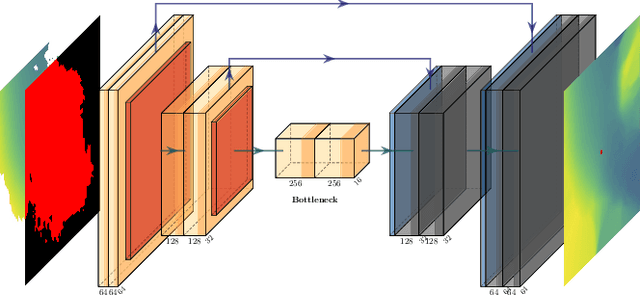
Accurate and complete terrain maps enhance the awareness of autonomous robots and enable safe and optimal path planning. Rocks and topography often create occlusions and lead to missing elevation information in the Digital Elevation Map (DEM). Currently, mostly traditional inpainting techniques based on diffusion or patch-matching are used by autonomous mobile robots to fill-in incomplete DEMs. These methods cannot leverage the high-level terrain characteristics and the geometric constraints of line of sight we humans use intuitively to predict occluded areas. We propose to use neural networks to reconstruct the occluded areas in DEMs. We introduce a self-supervised learning approach capable of training on real-world data without a need for ground-truth information. We accomplish this by adding artificial occlusion to the incomplete elevation maps constructed on a real robot by performing ray casting. We first evaluate a supervised learning approach on synthetic data for which we have the full ground-truth available and subsequently move to several real-world datasets. These real-world datasets were recorded during autonomous exploration of both structured and unstructured terrain with a legged robot, and additionally in a planetary scenario on Lunar analogue terrain. We state a significant improvement compared to the Telea and Navier-Stokes baseline methods both on synthetic terrain and for the real-world datasets. Our neural network is able to run in real-time on both CPU and GPU with suitable sampling rates for autonomous ground robots.