 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSingle Channel-based Motor Imagery Classification using Fisher's Ratio and Pearson Correlation
Jun 20, 2024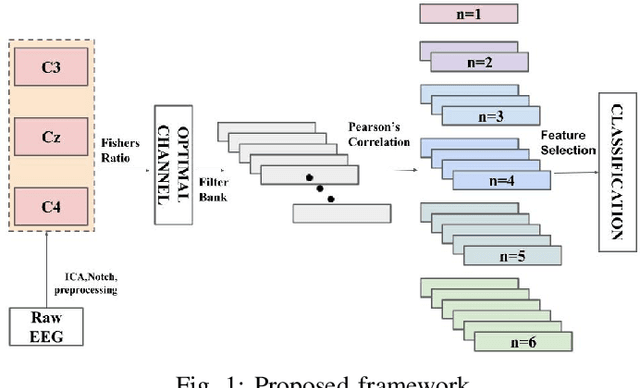
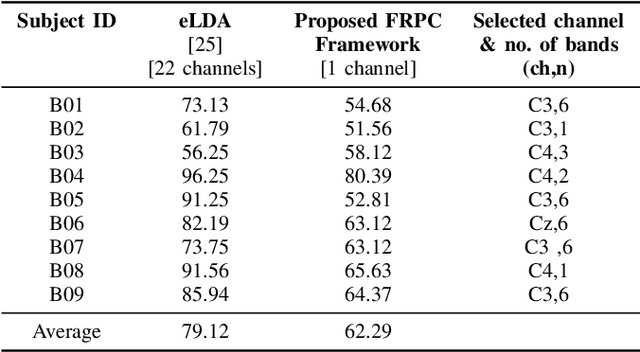
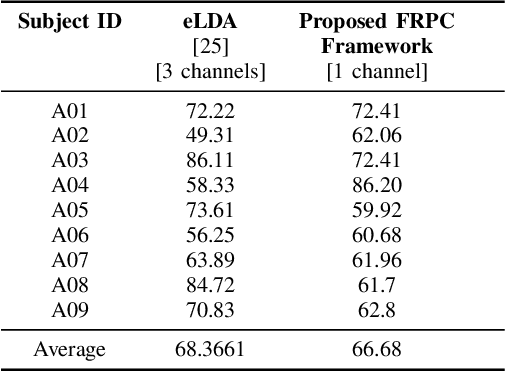
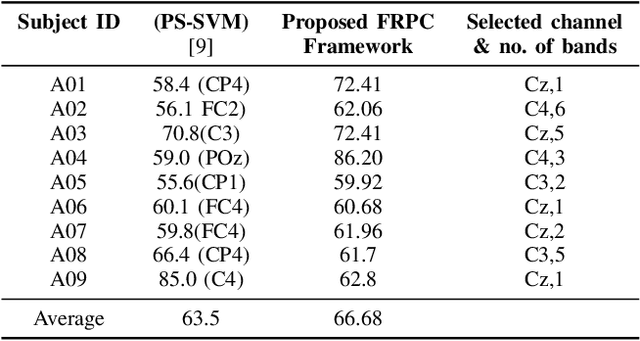
Motor imagery-based BCI systems have been promising and gaining popularity in rehabilitation and Activities of daily life(ADL). Despite this, the technology is still emerging and has not yet been outside the laboratory constraints. Channel reduction is one contributing avenue to make these systems part of ADL. Although Motor Imagery classification heavily depends on spatial factors, single channel-based classification remains an avenue to be explored thoroughly. Since Fisher's ratio and Pearson Correlation are powerful measures actively used in the domain, we propose an integrated framework (FRPC integrated framework) that integrates Fisher's Ratio to select the best channel and Pearson correlation to select optimal filter banks and extract spectral and temporal features respectively. The framework is tested for a 2-class motor imagery classification on 2 open-source datasets and 1 collected dataset and compared with state-of-art work. Apart from implementing the framework, this study also explores the most optimal channel among all the subjects and later explores classes where the single-channel framework is efficient.
Guiding Soft Robots with Motor-Imagery Brain Signals and Impedance Control
Jan 24, 2024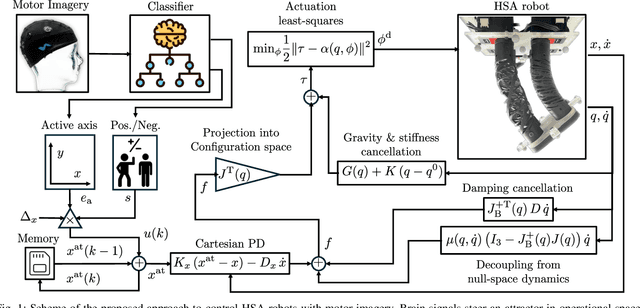
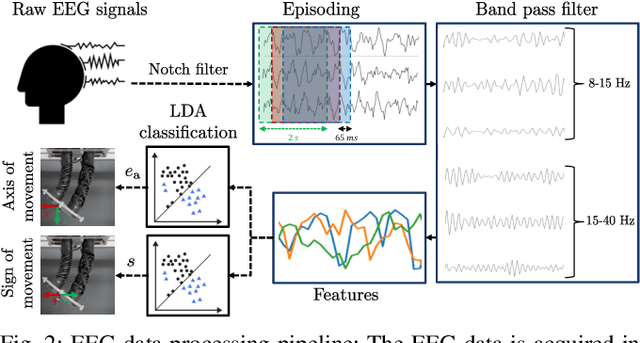
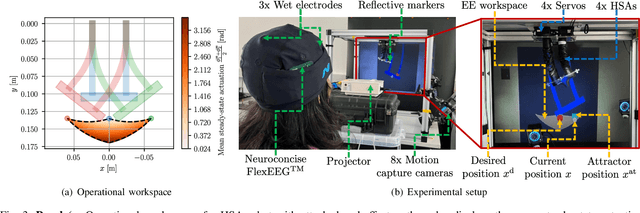
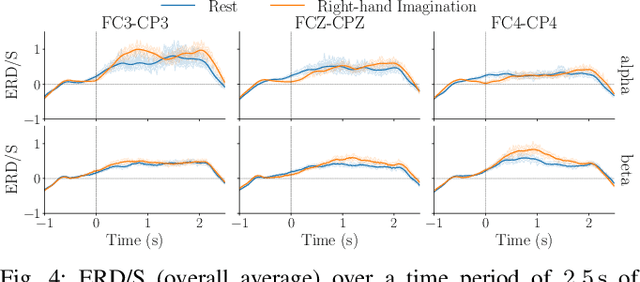
Integrating Brain-Machine Interfaces into non-clinical applications like robot motion control remains difficult - despite remarkable advancements in clinical settings. Specifically, EEG-based motor imagery systems are still error-prone, posing safety risks when rigid robots operate near humans. This work presents an alternative pathway towards safe and effective operation by combining wearable EEG with physically embodied safety in soft robots. We introduce and test a pipeline that allows a user to move a soft robot's end effector in real time via brain waves that are measured by as few as three EEG channels. A robust motor imagery algorithm interprets the user's intentions to move the position of a virtual attractor to which the end effector is attracted, thanks to a new Cartesian impedance controller. We specifically focus here on planar soft robot-based architected metamaterials, which require the development of a novel control architecture to deal with the peculiar nonlinearities - e.g., non-affinity in control. We preliminarily but quantitatively evaluate the approach on the task of setpoint regulation. We observe that the user reaches the proximity of the setpoint in 66% of steps and that for successful steps, the average response time is 21.5s. We also demonstrate the execution of simple real-world tasks involving interaction with the environment, which would be extremely hard to perform if it were not for the robot's softness.