 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeActive Measurement of Two-Point Correlations
Apr 06, 2026Two-point correlation functions (2PCF) are widely used to characterize how points cluster in space. In this work, we study the problem of measuring the 2PCF over a large set of points, restricted to a subset satisfying a property of interest. An example comes from astronomy, where scientists measure the 2PCF of star clusters, which make up only a tiny subset of possible sources within a galaxy. This task typically requires careful labeling of sources to construct catalogs, which is time-consuming. We present a human-in-the-loop framework for efficient estimation of 2PCF of target sources. By leveraging a pre-trained classifier to guide sampling, our approach adaptively selects the most informative points for human annotation. After each annotation, it produces unbiased estimates of pair counts across multiple distance bins simultaneously. Compared to simple Monte Carlo approaches, our method achieves substantially lower variance while significantly reducing annotation effort. We introduce a novel unbiased estimator, sampling strategy, and confidence interval construction that together enable scalable and statistically grounded measurement of two-point correlations in astronomy datasets.
RealBirdID: Benchmarking Bird Species Identification in the Era of MLLMs
Mar 27, 2026Fine-grained bird species identification in the wild is frequently unanswerable from a single image: key cues may be non-visual (e.g. vocalization), or obscured due to occlusion, camera angle, or low resolution. Yet today's multimodal systems are typically judged on answerable, in-schema cases, encouraging confident guesses rather than principled abstention. We propose the RealBirdID benchmark: given an image of a bird, a system should either answer with a species or abstain with a concrete, evidence-based rationale: "requires vocalization," "low quality image," or "view obstructed". For each genus, the dataset includes a validation split composed of curated unanswerable examples with labeled rationales, paired with a companion set of clearly answerable instances. We find that (1) the species identification on the answerable set is challenging for a variety of open-source and proprietary models (less than 13% accuracy for MLLMs including GPT-5 and Gemini-2.5 Pro), (2) models with greater classification ability are not necessarily more calibrated to abstain from unanswerable examples, and (3) that MLLMs generally fail at providing correct reasons even when they do abstain. RealBirdID establishes a focused target for abstention-aware fine-grained recognition and a recipe for measuring progress.
Active Measurement: Efficient Estimation at Scale
Jul 02, 2025AI has the potential to transform scientific discovery by analyzing vast datasets with little human effort. However, current workflows often do not provide the accuracy or statistical guarantees that are needed. We introduce active measurement, a human-in-the-loop AI framework for scientific measurement. An AI model is used to predict measurements for individual units, which are then sampled for human labeling using importance sampling. With each new set of human labels, the AI model is improved and an unbiased Monte Carlo estimate of the total measurement is refined. Active measurement can provide precise estimates even with an imperfect AI model, and requires little human effort when the AI model is very accurate. We derive novel estimators, weighting schemes, and confidence intervals, and show that active measurement reduces estimation error compared to alternatives in several measurement tasks.
Few-shot Species Range Estimation
Feb 20, 2025Knowing where a particular species can or cannot be found on Earth is crucial for ecological research and conservation efforts. By mapping the spatial ranges of all species, we would obtain deeper insights into how global biodiversity is affected by climate change and habitat loss. However, accurate range estimates are only available for a relatively small proportion of all known species. For the majority of the remaining species, we often only have a small number of records denoting the spatial locations where they have previously been observed. We outline a new approach for few-shot species range estimation to address the challenge of accurately estimating the range of a species from limited data. During inference, our model takes a set of spatial locations as input, along with optional metadata such as text or an image, and outputs a species encoding that can be used to predict the range of a previously unseen species in feed-forward manner. We validate our method on two challenging benchmarks, where we obtain state-of-the-art range estimation performance, in a fraction of the compute time, compared to recent alternative approaches.
Combining Observational Data and Language for Species Range Estimation
Oct 14, 2024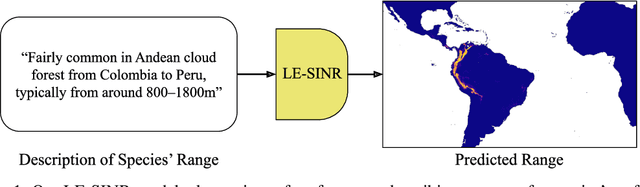
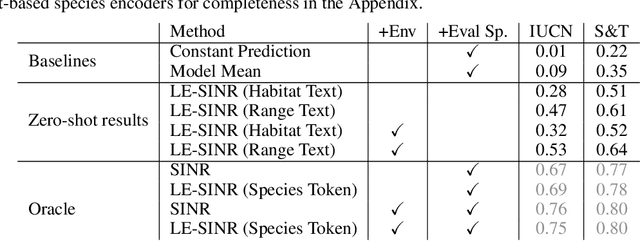
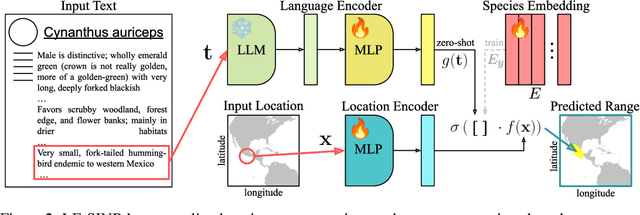
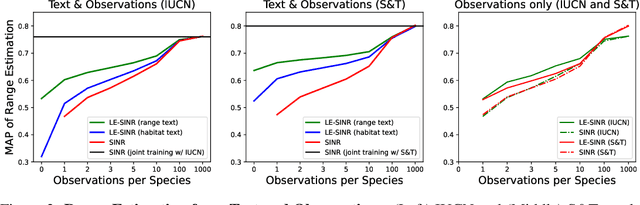
Species range maps (SRMs) are essential tools for research and policy-making in ecology, conservation, and environmental management. However, traditional SRMs rely on the availability of environmental covariates and high-quality species location observation data, both of which can be challenging to obtain due to geographic inaccessibility and resource constraints. We propose a novel approach combining millions of citizen science species observations with textual descriptions from Wikipedia, covering habitat preferences and range descriptions for tens of thousands of species. Our framework maps locations, species, and text descriptions into a common space, facilitating the learning of rich spatial covariates at a global scale and enabling zero-shot range estimation from textual descriptions. Evaluated on held-out species, our zero-shot SRMs significantly outperform baselines and match the performance of SRMs obtained using tens of observations. Our approach also acts as a strong prior when combined with observational data, resulting in more accurate range estimation with less data. We present extensive quantitative and qualitative analyses of the learned representations in the context of range estimation and other spatial tasks, demonstrating the effectiveness of our approach.
OASIS: A Large-Scale Dataset for Single Image 3D in the Wild
Jul 26, 2020
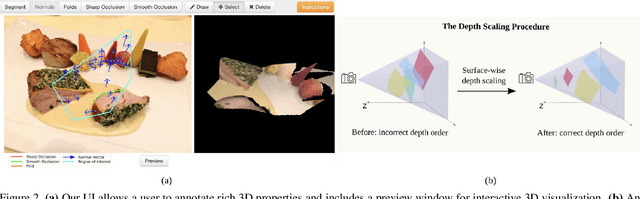
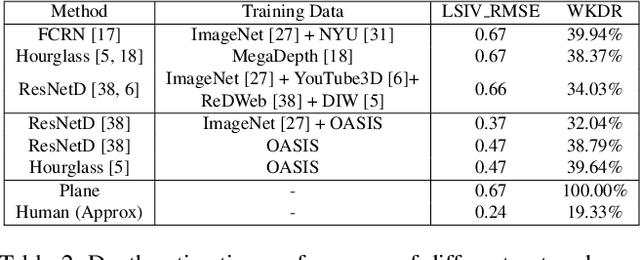
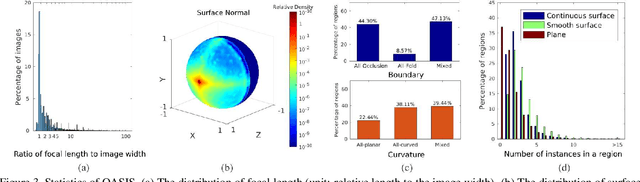
Single-view 3D is the task of recovering 3D properties such as depth and surface normals from a single image. We hypothesize that a major obstacle to single-image 3D is data. We address this issue by presenting Open Annotations of Single Image Surfaces (OASIS), a dataset for single-image 3D in the wild consisting of annotations of detailed 3D geometry for 140,000 images. We train and evaluate leading models on a variety of single-image 3D tasks. We expect OASIS to be a useful resource for 3D vision research. Project site: https://pvl.cs.princeton.edu/OASIS.