 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFew-shot Species Range Estimation
Feb 20, 2025Knowing where a particular species can or cannot be found on Earth is crucial for ecological research and conservation efforts. By mapping the spatial ranges of all species, we would obtain deeper insights into how global biodiversity is affected by climate change and habitat loss. However, accurate range estimates are only available for a relatively small proportion of all known species. For the majority of the remaining species, we often only have a small number of records denoting the spatial locations where they have previously been observed. We outline a new approach for few-shot species range estimation to address the challenge of accurately estimating the range of a species from limited data. During inference, our model takes a set of spatial locations as input, along with optional metadata such as text or an image, and outputs a species encoding that can be used to predict the range of a previously unseen species in feed-forward manner. We validate our method on two challenging benchmarks, where we obtain state-of-the-art range estimation performance, in a fraction of the compute time, compared to recent alternative approaches.
Combining Observational Data and Language for Species Range Estimation
Oct 14, 2024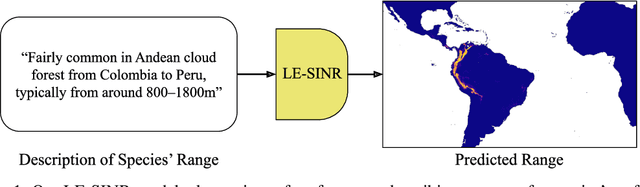
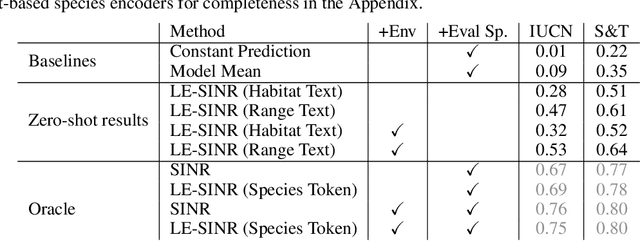
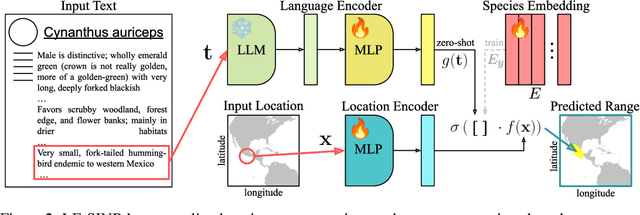
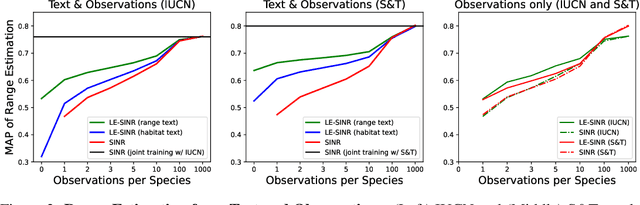
Species range maps (SRMs) are essential tools for research and policy-making in ecology, conservation, and environmental management. However, traditional SRMs rely on the availability of environmental covariates and high-quality species location observation data, both of which can be challenging to obtain due to geographic inaccessibility and resource constraints. We propose a novel approach combining millions of citizen science species observations with textual descriptions from Wikipedia, covering habitat preferences and range descriptions for tens of thousands of species. Our framework maps locations, species, and text descriptions into a common space, facilitating the learning of rich spatial covariates at a global scale and enabling zero-shot range estimation from textual descriptions. Evaluated on held-out species, our zero-shot SRMs significantly outperform baselines and match the performance of SRMs obtained using tens of observations. Our approach also acts as a strong prior when combined with observational data, resulting in more accurate range estimation with less data. We present extensive quantitative and qualitative analyses of the learned representations in the context of range estimation and other spatial tasks, demonstrating the effectiveness of our approach.
Generating Binary Species Range Maps
Aug 28, 2024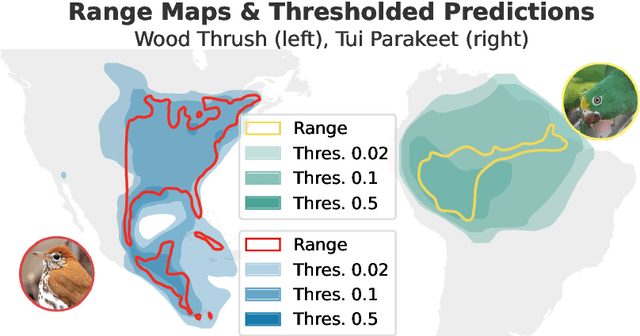

Accurately predicting the geographic ranges of species is crucial for assisting conservation efforts. Traditionally, range maps were manually created by experts. However, species distribution models (SDMs) and, more recently, deep learning-based variants offer a potential automated alternative. Deep learning-based SDMs generate a continuous probability representing the predicted presence of a species at a given location, which must be binarized by setting per-species thresholds to obtain binary range maps. However, selecting appropriate per-species thresholds to binarize these predictions is non-trivial as different species can require distinct thresholds. In this work, we evaluate different approaches for automatically identifying the best thresholds for binarizing range maps using presence-only data. This includes approaches that require the generation of additional pseudo-absence data, along with ones that only require presence data. We also propose an extension of an existing presence-only technique that is more robust to outliers. We perform a detailed evaluation of different thresholding techniques on the tasks of binary range estimation and large-scale fine-grained visual classification, and we demonstrate improved performance over existing pseudo-absence free approaches using our method.
Active Learning-Based Species Range Estimation
Nov 03, 2023We propose a new active learning approach for efficiently estimating the geographic range of a species from a limited number of on the ground observations. We model the range of an unmapped species of interest as the weighted combination of estimated ranges obtained from a set of different species. We show that it is possible to generate this candidate set of ranges by using models that have been trained on large weakly supervised community collected observation data. From this, we develop a new active querying approach that sequentially selects geographic locations to visit that best reduce our uncertainty over an unmapped species' range. We conduct a detailed evaluation of our approach and compare it to existing active learning methods using an evaluation dataset containing expert-derived ranges for one thousand species. Our results demonstrate that our method outperforms alternative active learning methods and approaches the performance of end-to-end trained models, even when only using a fraction of the data. This highlights the utility of active learning via transfer learned spatial representations for species range estimation. It also emphasizes the value of leveraging emerging large-scale crowdsourced datasets, not only for modeling a species' range, but also for actively discovering them.
Spatial Implicit Neural Representations for Global-Scale Species Mapping
Jun 05, 2023Estimating the geographical range of a species from sparse observations is a challenging and important geospatial prediction problem. Given a set of locations where a species has been observed, the goal is to build a model to predict whether the species is present or absent at any location. This problem has a long history in ecology, but traditional methods struggle to take advantage of emerging large-scale crowdsourced datasets which can include tens of millions of records for hundreds of thousands of species. In this work, we use Spatial Implicit Neural Representations (SINRs) to jointly estimate the geographical range of 47k species simultaneously. We find that our approach scales gracefully, making increasingly better predictions as we increase the number of species and the amount of data per species when training. To make this problem accessible to machine learning researchers, we provide four new benchmarks that measure different aspects of species range estimation and spatial representation learning. Using these benchmarks, we demonstrate that noisy and biased crowdsourced data can be combined with implicit neural representations to approximate expert-developed range maps for many species.