 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCapture Stage Environments: A Guide to Better Matting
Jul 10, 2025



Capture stages are high-end sources of state-of-the-art recordings for downstream applications in movies, games, and other media. One crucial step in almost all pipelines is the matting of images to isolate the captured performances from the background. While common matting algorithms deliver remarkable performance in other applications like teleconferencing and mobile entertainment, we found that they struggle significantly with the peculiarities of capture stage content. The goal of our work is to share insights into those challenges as a curated list of those characteristics along with a constructive discussion for proactive intervention and present a guideline to practitioners for an improved workflow to mitigate unresolved challenges. To this end, we also demonstrate an efficient pipeline to adapt state-of-the-art approaches to such custom setups without the need of extensive annotations, both offline and real-time. For an objective evaluation, we propose a validation methodology based on a leading diffusion model that highlights the benefits of our approach.
VHS: High-Resolution Iterative Stereo Matching with Visual Hull Priors
Jun 04, 2024We present a stereo-matching method for depth estimation from high-resolution images using visual hulls as priors, and a memory-efficient technique for the correlation computation. Our method uses object masks extracted from supplementary views of the scene to guide the disparity estimation, effectively reducing the search space for matches. This approach is specifically tailored to stereo rigs in volumetric capture systems, where an accurate depth plays a key role in the downstream reconstruction task. To enable training and regression at high resolutions targeted by recent systems, our approach extends a sparse correlation computation into a hybrid sparse-dense scheme suitable for application in leading recurrent network architectures. We evaluate the performance-efficiency trade-off of our method compared to state-of-the-art methods, and demonstrate the efficacy of the visual hull guidance. In addition, we propose a training scheme for a further reduction of memory requirements during optimization, facilitating training on high-resolution data.
Deep Non-Line-of-Sight Reconstruction
Jan 29, 2020



The recent years have seen a surge of interest in methods for imaging beyond the direct line of sight. The most prominent techniques rely on time-resolved optical impulse responses, obtained by illuminating a diffuse wall with an ultrashort light pulse and observing multi-bounce indirect reflections with an ultrafast time-resolved imager. Reconstruction of geometry from such data, however, is a complex non-linear inverse problem that comes with substantial computational demands. In this paper, we employ convolutional feed-forward networks for solving the reconstruction problem efficiently while maintaining good reconstruction quality. Specifically, we devise a tailored autoencoder architecture, trained end-to-end, that maps transient images directly to a depth map representation. Training is done using an efficient transient renderer for diffuse three-bounce indirect light transport that enables the quick generation of large amounts of training data for the network. We examine the performance of our method on a variety of synthetic and experimental datasets and its dependency on the choice of training data and augmentation strategies, as well as architectural features. We demonstrate that our feed-forward network, even though it is trained solely on synthetic data, generalizes to measured data from SPAD sensors and is able to obtain results that are competitive with model-based reconstruction methods.
A Calibration Scheme for Non-Line-of-Sight Imaging Setups
Dec 20, 2019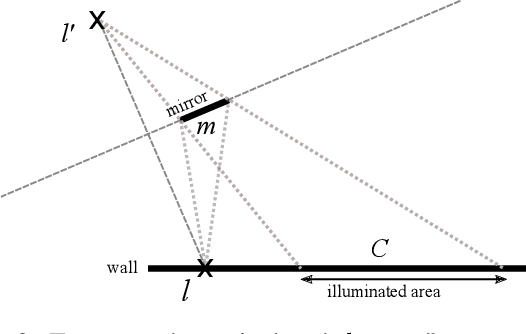
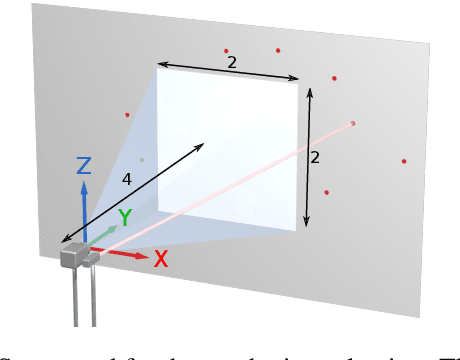
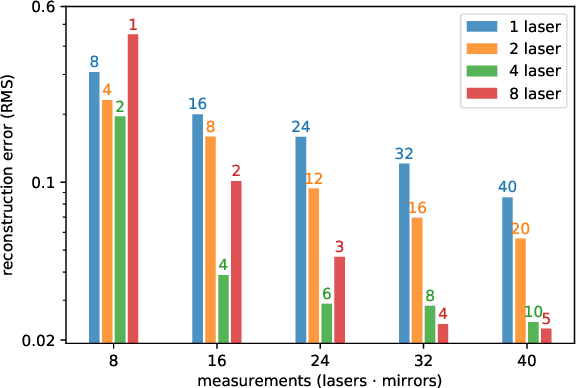
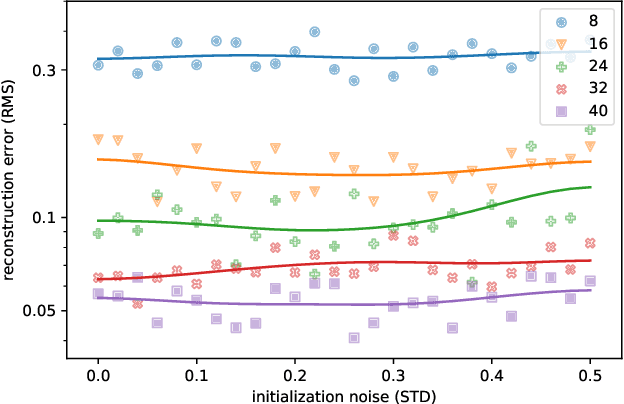
The recent years have given rise to a large number of techniques for "looking around corners", i.e., for reconstructing occluded objects from time-resolved measurements of indirect light reflections off a wall. While the direct view of cameras is routinely calibrated in computer vision applications, the calibration of non-line-of-sight setups has so far relied on manual measurement of the most important dimensions (device positions, wall position and orientation, etc.). In this paper, we propose a semi-automatic method for calibrating such systems that relies on mirrors as known targets. A roughly determined initialization is refined in order to optimize a spatio-temporal consistency. Our system is general enough to be applicable to a variety of sensing scenarios ranging from single sources/detectors via scanning arrangements to large-scale arrays. It is robust towards bad initialization and the achieved accuracy is proportional to the depth resolution of the camera system. We demonstrate this capability with a real-world setup and despite a large number of dead pixels and very low temporal resolution achieve a result that outperforms a manual calibration.
Non-Line-of-Sight Reconstruction using Efficient Transient Rendering
Sep 21, 2018



Being able to see beyond the direct line of sight is an intriguing prospective and could benefit a wide variety of important applications. Recent work has demonstrated that time-resolved measurements of indirect diffuse light contain valuable information for reconstructing shape and reflectance properties of objects located around a corner. In this paper, we introduce a novel reconstruction scheme that, by design, produces solutions that are consistent with state-of-the-art physically-based rendering. Our method combines an efficient forward model (a custom renderer for time-resolved three-bounce indirect light transport) with an optimization framework to reconstruct object geometry in an analysis-by-synthesis sense. We evaluate our algorithm on a variety of synthetic and experimental input data, and show that it gracefully handles uncooperative scenes with high levels of noise or non-diffuse material reflectance.
Automated Phenotyping of Epicuticular Waxes of Grapevine Berries Using Light Separation and Convolutional Neural Networks
Sep 06, 2018
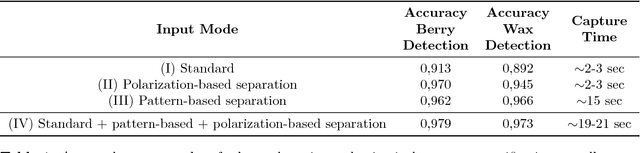

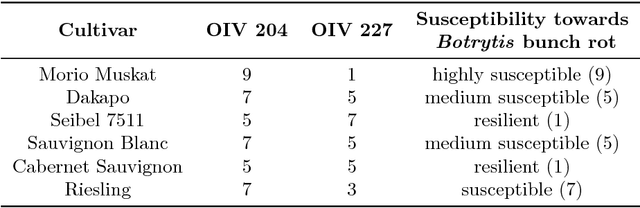
In viticulture the epicuticular wax as the outer layer of the berry skin is known as trait which is correlated to resilience towards Botrytis bunch rot. Traditionally this trait is classified using the OIV descriptor 227 (berry bloom) in a time consuming way resulting in subjective and error-prone phenotypic data. In the present study an objective, fast and sensor-based approach was developed to monitor berry bloom. From the technical point-of-view, it is known that the measurement of different illumination components conveys important information about observed object surfaces. A Mobile Light-Separation-Lab is proposed in order to capture illumination-separated images of grapevine berries for phenotyping the distribution of epicuticular waxes (berry bloom). For image analysis, an efficient convolutional neural network approach is used to derive the uniformity and intactness of waxes on berries. Method validation over six grapevine cultivars shows accuracies up to $97.3$%. In addition, electrical impedance of the cuticle and its epicuticular waxes (described as an indicator for the thickness of berry skin and its permeability) was correlated to the detected proportion of waxes with $r=0.76$. This novel, fast and non-invasive phenotyping approach facilitates enlarged screenings within grapevine breeding material and genetic repositories regarding berry bloom characteristics and its impact on resilience towards Botrytis bunch rot.
Optically lightweight tracking of objects around a corner
Jun 03, 2016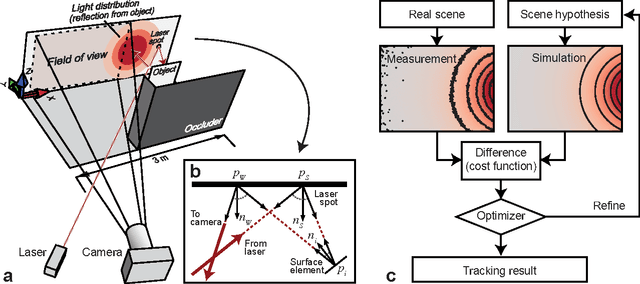
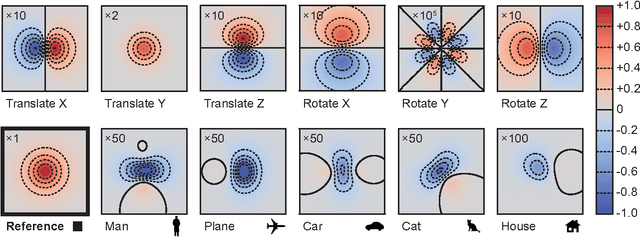

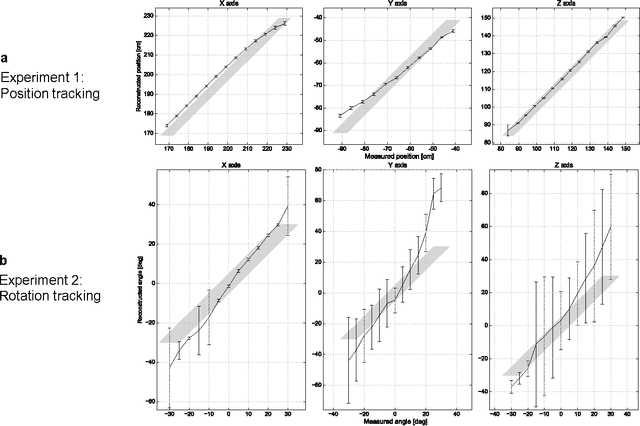
The observation of objects located in inaccessible regions is a recurring challenge in a wide variety of important applications. Recent work has shown that indirect diffuse light reflections can be used to reconstruct objects and two-dimensional (2D) patterns around a corner. However, these prior methods always require some specialized setup involving either ultrafast detectors or narrowband light sources. Here we show that occluded objects can be tracked in real time using a standard 2D camera and a laser pointer. Unlike previous methods based on the backprojection approach, we formulate the problem in an analysis-by-synthesis sense. By repeatedly simulating light transport through the scene, we determine the set of object parameters that most closely fits the measured intensity distribution. We experimentally demonstrate that this approach is capable of following the translation of unknown objects, and translation and orientation of a known object, in real time.