 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Non-Line-of-Sight Reconstruction
Jan 29, 2020



The recent years have seen a surge of interest in methods for imaging beyond the direct line of sight. The most prominent techniques rely on time-resolved optical impulse responses, obtained by illuminating a diffuse wall with an ultrashort light pulse and observing multi-bounce indirect reflections with an ultrafast time-resolved imager. Reconstruction of geometry from such data, however, is a complex non-linear inverse problem that comes with substantial computational demands. In this paper, we employ convolutional feed-forward networks for solving the reconstruction problem efficiently while maintaining good reconstruction quality. Specifically, we devise a tailored autoencoder architecture, trained end-to-end, that maps transient images directly to a depth map representation. Training is done using an efficient transient renderer for diffuse three-bounce indirect light transport that enables the quick generation of large amounts of training data for the network. We examine the performance of our method on a variety of synthetic and experimental datasets and its dependency on the choice of training data and augmentation strategies, as well as architectural features. We demonstrate that our feed-forward network, even though it is trained solely on synthetic data, generalizes to measured data from SPAD sensors and is able to obtain results that are competitive with model-based reconstruction methods.
A Calibration Scheme for Non-Line-of-Sight Imaging Setups
Dec 20, 2019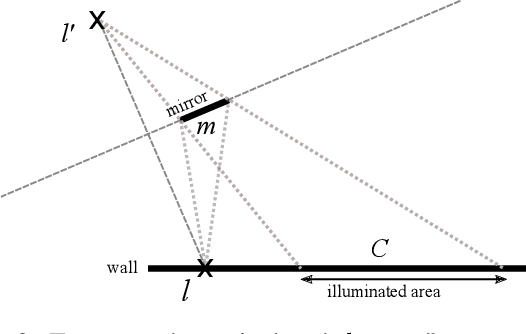
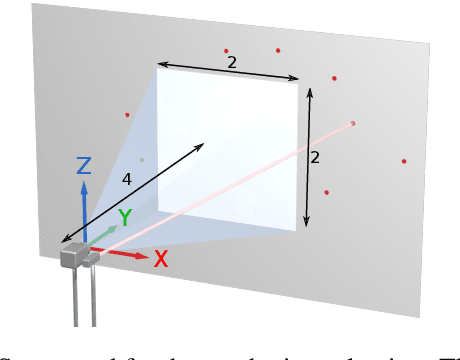
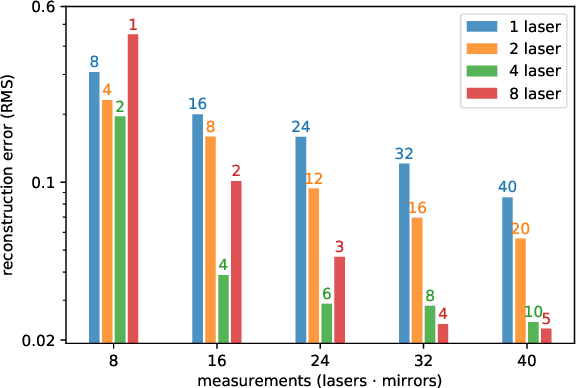
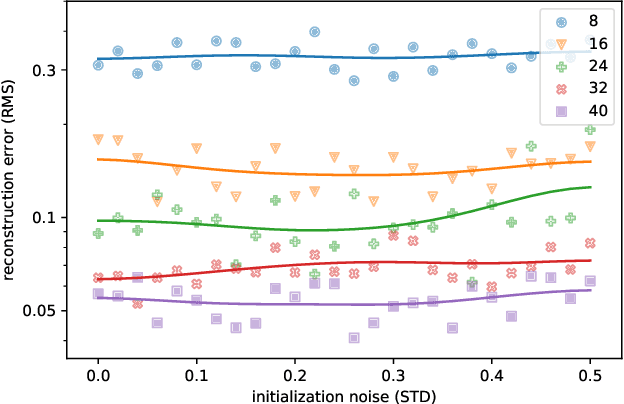
The recent years have given rise to a large number of techniques for "looking around corners", i.e., for reconstructing occluded objects from time-resolved measurements of indirect light reflections off a wall. While the direct view of cameras is routinely calibrated in computer vision applications, the calibration of non-line-of-sight setups has so far relied on manual measurement of the most important dimensions (device positions, wall position and orientation, etc.). In this paper, we propose a semi-automatic method for calibrating such systems that relies on mirrors as known targets. A roughly determined initialization is refined in order to optimize a spatio-temporal consistency. Our system is general enough to be applicable to a variety of sensing scenarios ranging from single sources/detectors via scanning arrangements to large-scale arrays. It is robust towards bad initialization and the achieved accuracy is proportional to the depth resolution of the camera system. We demonstrate this capability with a real-world setup and despite a large number of dead pixels and very low temporal resolution achieve a result that outperforms a manual calibration.
Non-Line-of-Sight Reconstruction using Efficient Transient Rendering
Sep 21, 2018



Being able to see beyond the direct line of sight is an intriguing prospective and could benefit a wide variety of important applications. Recent work has demonstrated that time-resolved measurements of indirect diffuse light contain valuable information for reconstructing shape and reflectance properties of objects located around a corner. In this paper, we introduce a novel reconstruction scheme that, by design, produces solutions that are consistent with state-of-the-art physically-based rendering. Our method combines an efficient forward model (a custom renderer for time-resolved three-bounce indirect light transport) with an optimization framework to reconstruct object geometry in an analysis-by-synthesis sense. We evaluate our algorithm on a variety of synthetic and experimental input data, and show that it gracefully handles uncooperative scenes with high levels of noise or non-diffuse material reflectance.