 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Calibration Scheme for Non-Line-of-Sight Imaging Setups
Dec 20, 2019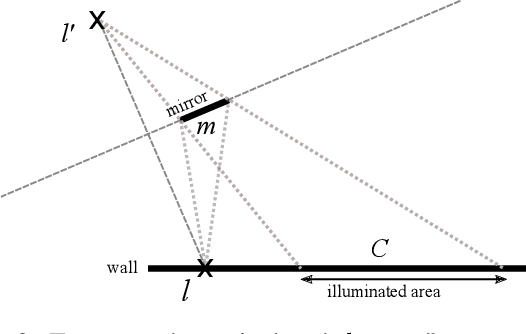
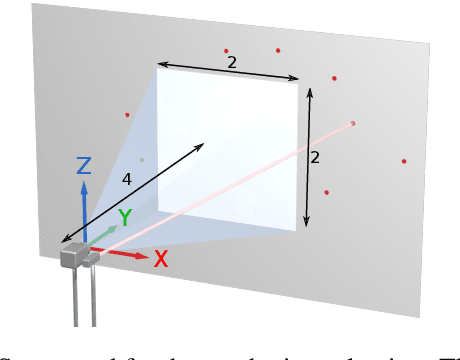
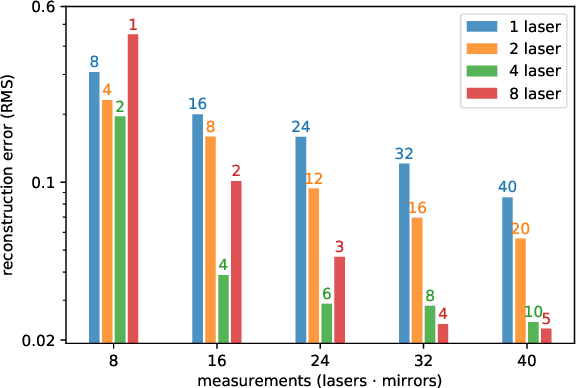
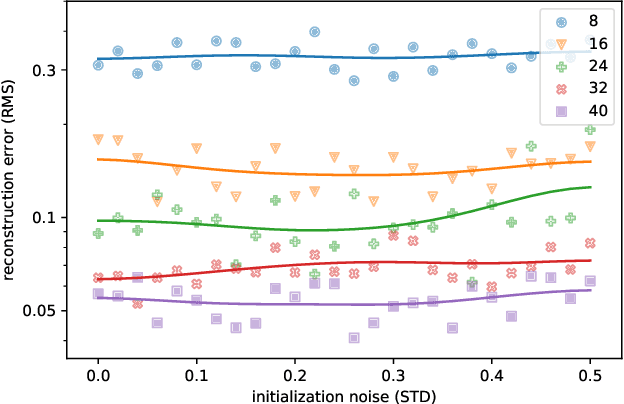
The recent years have given rise to a large number of techniques for "looking around corners", i.e., for reconstructing occluded objects from time-resolved measurements of indirect light reflections off a wall. While the direct view of cameras is routinely calibrated in computer vision applications, the calibration of non-line-of-sight setups has so far relied on manual measurement of the most important dimensions (device positions, wall position and orientation, etc.). In this paper, we propose a semi-automatic method for calibrating such systems that relies on mirrors as known targets. A roughly determined initialization is refined in order to optimize a spatio-temporal consistency. Our system is general enough to be applicable to a variety of sensing scenarios ranging from single sources/detectors via scanning arrangements to large-scale arrays. It is robust towards bad initialization and the achieved accuracy is proportional to the depth resolution of the camera system. We demonstrate this capability with a real-world setup and despite a large number of dead pixels and very low temporal resolution achieve a result that outperforms a manual calibration.
Optically lightweight tracking of objects around a corner
Jun 03, 2016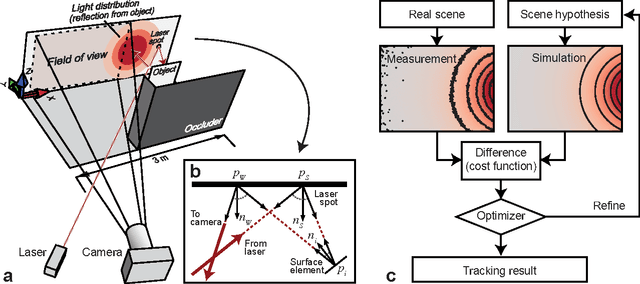
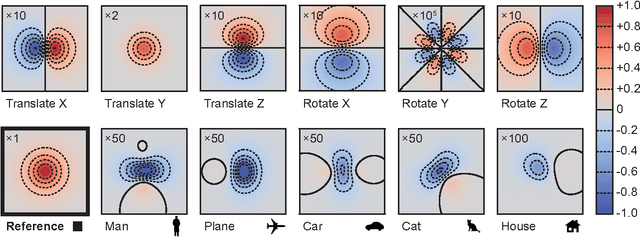

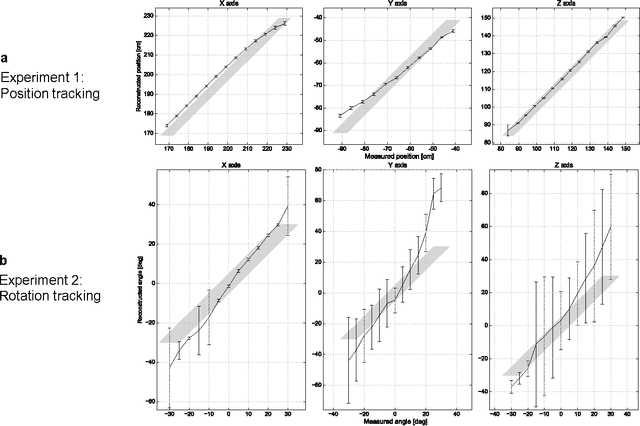
The observation of objects located in inaccessible regions is a recurring challenge in a wide variety of important applications. Recent work has shown that indirect diffuse light reflections can be used to reconstruct objects and two-dimensional (2D) patterns around a corner. However, these prior methods always require some specialized setup involving either ultrafast detectors or narrowband light sources. Here we show that occluded objects can be tracked in real time using a standard 2D camera and a laser pointer. Unlike previous methods based on the backprojection approach, we formulate the problem in an analysis-by-synthesis sense. By repeatedly simulating light transport through the scene, we determine the set of object parameters that most closely fits the measured intensity distribution. We experimentally demonstrate that this approach is capable of following the translation of unknown objects, and translation and orientation of a known object, in real time.