 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCounterfactual-based Root Cause Analysis for Dynamical Systems
Jun 12, 2024

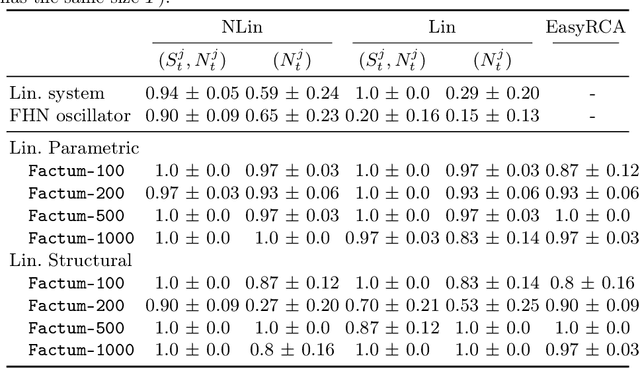

Identifying the underlying reason for a failing dynamic process or otherwise anomalous observation is a fundamental challenge, yet has numerous industrial applications. Identifying the failure-causing sub-system using causal inference, one can ask the question: "Would the observed failure also occur, if we had replaced the behaviour of a sub-system at a certain point in time with its normal behaviour?" To this end, a formal description of behaviour of the full system is needed in which such counterfactual questions can be answered. However, existing causal methods for root cause identification are typically limited to static settings and focusing on additive external influences causing failures rather than structural influences. In this paper, we address these problems by modelling the dynamic causal system using a Residual Neural Network and deriving corresponding counterfactual distributions over trajectories. We show quantitatively that more root causes are identified when an intervention is performed on the structural equation and the external influence, compared to an intervention on the external influence only. By employing an efficient approximation to a corresponding Shapley value, we also obtain a ranking between the different subsystems at different points in time being responsible for an observed failure, which is applicable in settings with large number of variables. We illustrate the effectiveness of the proposed method on a benchmark dynamic system as well as on a real world river dataset.
Safety Shielding under Delayed Observation
Jul 05, 2023Agents operating in physical environments need to be able to handle delays in the input and output signals since neither data transmission nor sensing or actuating the environment are instantaneous. Shields are correct-by-construction runtime enforcers that guarantee safe execution by correcting any action that may cause a violation of a formal safety specification. Besides providing safety guarantees, shields should interfere minimally with the agent. Therefore, shields should pick the safe corrective actions in such a way that future interferences are most likely minimized. Current shielding approaches do not consider possible delays in the input signals in their safety analyses. In this paper, we address this issue. We propose synthesis algorithms to compute \emph{delay-resilient shields} that guarantee safety under worst-case assumptions on the delays of the input signals. We also introduce novel heuristics for deciding between multiple corrective actions, designed to minimize future shield interferences caused by delays. As a further contribution, we present the first integration of shields in a realistic driving simulator. We implemented our delayed shields in the driving simulator \textsc{Carla}. We shield potentially unsafe autonomous driving agents in different safety-critical scenarios and show the effect of delays on the safety analysis.
Verification of Sigmoidal Artificial Neural Networks using iSAT
Jul 14, 2022
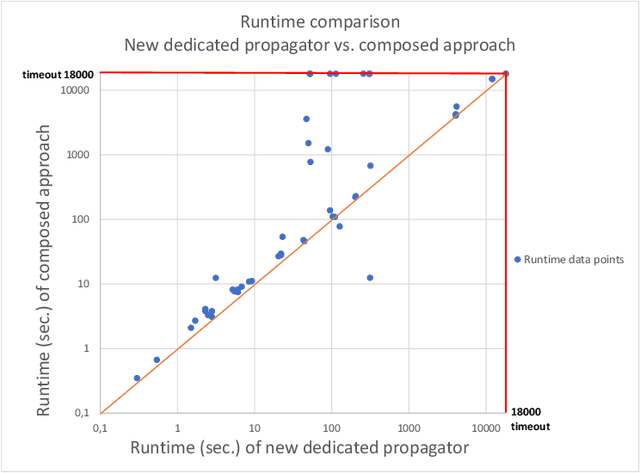

This paper presents an approach for verifying the behaviour of nonlinear Artificial Neural Networks (ANNs) found in cyber-physical safety-critical systems. We implement a dedicated interval constraint propagator for the sigmoid function into the SMT solver iSAT and compare this approach with a compositional approach encoding the sigmoid function by basic arithmetic features available in iSAT and an approximating approach. Our experimental results show that the dedicated and the compositional approach clearly outperform the approximating approach. Throughout all our benchmarks, the dedicated approach showed an equal or better performance compared to the compositional approach.
* In Proceedings SNR 2021, arXiv:2207.04391
Safe, Deterministic Trajectory Planning for Unstructured and Partially Occluded Environments
Sep 30, 2021
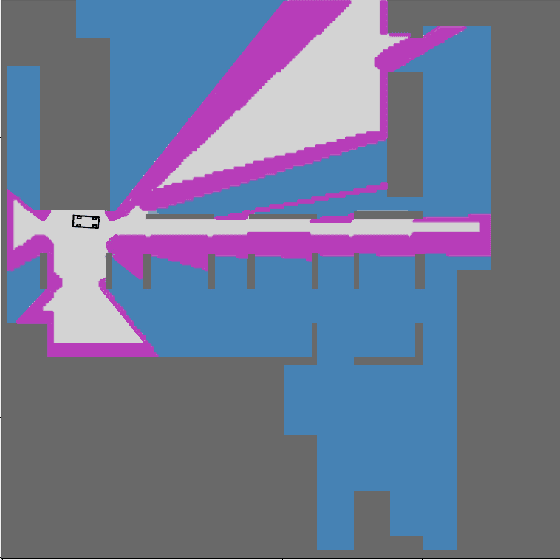
Ensuring safe behavior for automated vehicles in unregulated traffic areas poses a complex challenge for the industry. It is an open problem to provide scalable and certifiable solutions to this challenge. We derive a trajectory planner based on model predictive control which interoperates with a monitoring system for pedestrian safety based on cellular automata. The combined planner-monitor system is demonstrated on the example of a narrow indoor parking environment. The system features deterministic behavior, mitigating the immanent risk of black boxes and offering full certifiability. By using fundamental and conservative prediction models of pedestrians the monitor is able to determine a safe drivable area in the partially occluded and unstructured parking environment. The information is fed to the trajectory planner which ensures the vehicle remains in the safe drivable area at any time through constrained optimization. We show how the approach enables solving plenty of situations in tight parking garage scenarios. Even though conservative prediction models are applied, evaluations indicate a performant system for the tested low-speed navigation.