 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafe, Deterministic Trajectory Planning for Unstructured and Partially Occluded Environments
Paper and Code
Sep 30, 2021
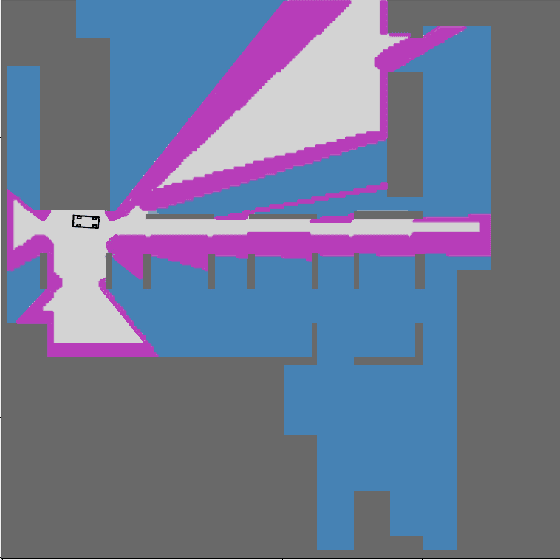
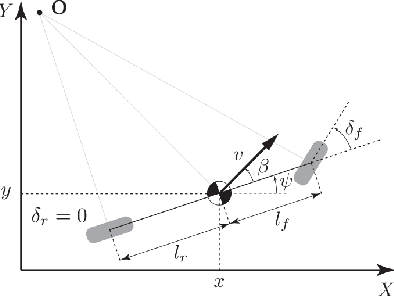
Ensuring safe behavior for automated vehicles in unregulated traffic areas poses a complex challenge for the industry. It is an open problem to provide scalable and certifiable solutions to this challenge. We derive a trajectory planner based on model predictive control which interoperates with a monitoring system for pedestrian safety based on cellular automata. The combined planner-monitor system is demonstrated on the example of a narrow indoor parking environment. The system features deterministic behavior, mitigating the immanent risk of black boxes and offering full certifiability. By using fundamental and conservative prediction models of pedestrians the monitor is able to determine a safe drivable area in the partially occluded and unstructured parking environment. The information is fed to the trajectory planner which ensures the vehicle remains in the safe drivable area at any time through constrained optimization. We show how the approach enables solving plenty of situations in tight parking garage scenarios. Even though conservative prediction models are applied, evaluations indicate a performant system for the tested low-speed navigation.