 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTouchInsight: Uncertainty-aware Rapid Touch and Text Input for Mixed Reality from Egocentric Vision
Oct 08, 2024While passive surfaces offer numerous benefits for interaction in mixed reality, reliably detecting touch input solely from head-mounted cameras has been a long-standing challenge. Camera specifics, hand self-occlusion, and rapid movements of both head and fingers introduce considerable uncertainty about the exact location of touch events. Existing methods have thus not been capable of achieving the performance needed for robust interaction. In this paper, we present a real-time pipeline that detects touch input from all ten fingers on any physical surface, purely based on egocentric hand tracking. Our method TouchInsight comprises a neural network to predict the moment of a touch event, the finger making contact, and the touch location. TouchInsight represents locations through a bivariate Gaussian distribution to account for uncertainties due to sensing inaccuracies, which we resolve through contextual priors to accurately infer intended user input. We first evaluated our method offline and found that it locates input events with a mean error of 6.3 mm, and accurately detects touch events (F1=0.99) and identifies the finger used (F1=0.96). In an online evaluation, we then demonstrate the effectiveness of our approach for a core application of dexterous touch input: two-handed text entry. In our study, participants typed 37.0 words per minute with an uncorrected error rate of 2.9% on average.
A recursive robust filtering approach for 3D registration
Oct 28, 2021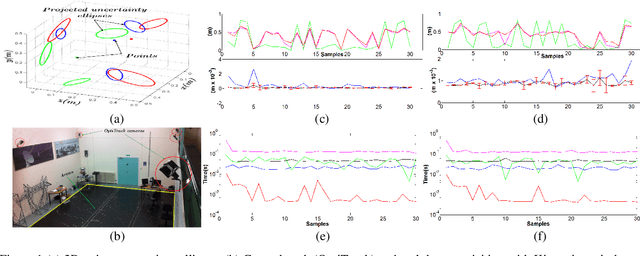
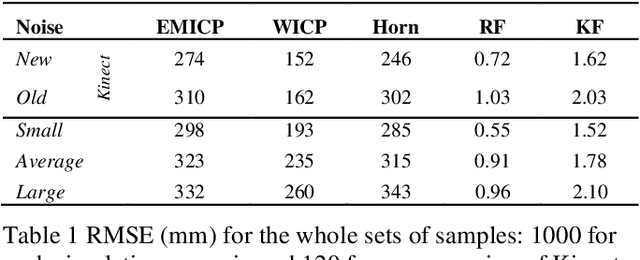
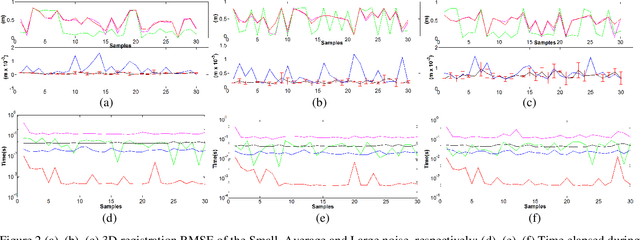
This work presents a new recursive robust filtering approach for feature-based 3D registration. Unlike the common state-of-the-art alignment algorithms, the proposed method has four advantages that have not yet occurred altogether in any previous solution. For instance, it is able to deal with inherent noise contaminating sensory data; it is robust to uncertainties caused by noisy feature localisation; it also combines the advantages of both (Formula presented.) and (Formula presented.) norms for a higher performance and a more prospective prevention of local minima. The result is an accurate and stable rigid body transformation. The latter enables a thorough control over the convergence regarding the alignment as well as a correct assessment of the quality of registration. The mathematical rationale behind the proposed approach is explained, and the results are validated on physical and synthetic data.
* Accepted in the journal of Signal Image and Video Processing
ITENE: Intrinsic Transfer Entropy Neural Estimator
Jan 08, 2020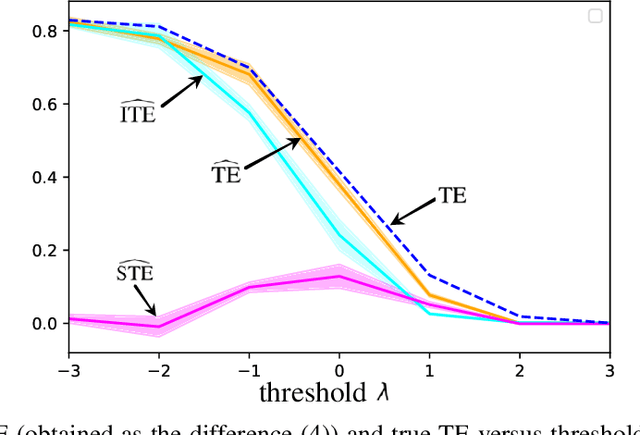
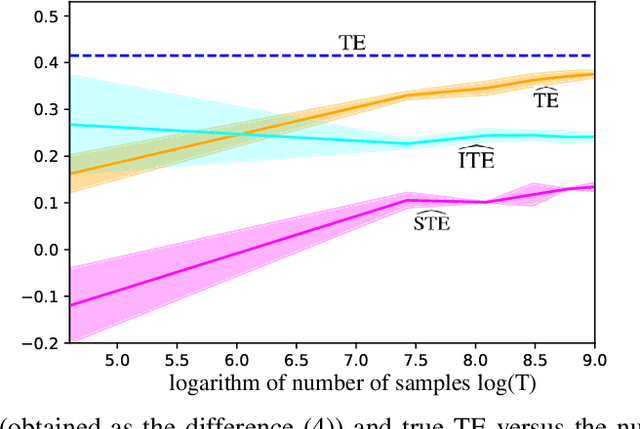
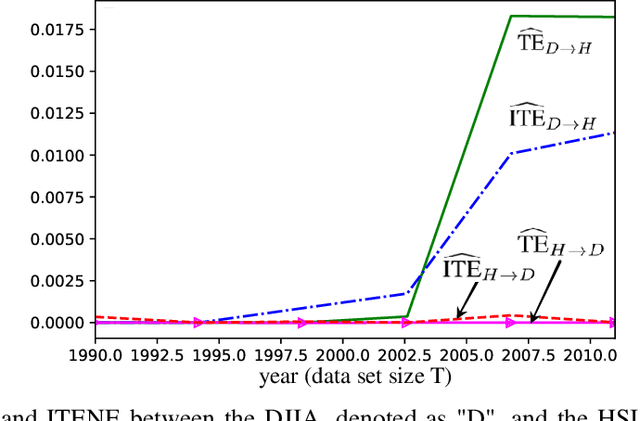
Quantifying the directionality of information flow is instrumental in understanding, and possibly controlling, the operation of many complex systems, such as transportation, social, neural, or gene-regulatory networks. The standard Transfer Entropy (TE) metric follows Granger's causality principle by measuring the Mutual Information (MI) between the past states of a source signal $X$ and the future state of a target signal $Y$ while conditioning on past states of $Y$. Hence, the TE quantifies the improvement, as measured by the log-loss, in the prediction of the target sequence $Y$ that can be accrued when, in addition to the past of $Y$, one also has available past samples from $X$. However, by conditioning on the past of $Y$, the TE also measures information that can be synergistically extracted by observing both the past of $X$ and $Y$, and not solely the past of $X$. Building on a private key agreement formulation, the Intrinsic TE (ITE) aims to discount such synergistic information to quantify the degree to which $X$ is \emph{individually} predictive of $Y$, independent of $Y$'s past. In this paper, an estimator of the ITE is proposed that is inspired by the recently proposed Mutual Information Neural Estimation (MINE). The estimator is based on variational bound on the KL divergence, two-sample neural network classifiers, and the pathwise estimator of Monte Carlo gradients.