 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutomating High Quality RT Planning at Scale
Jan 21, 2025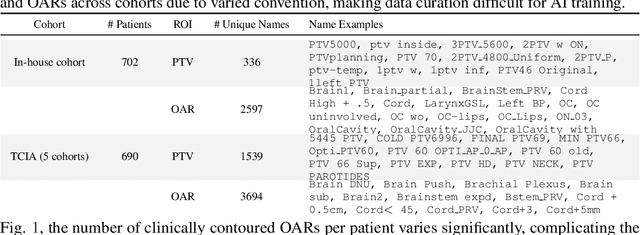
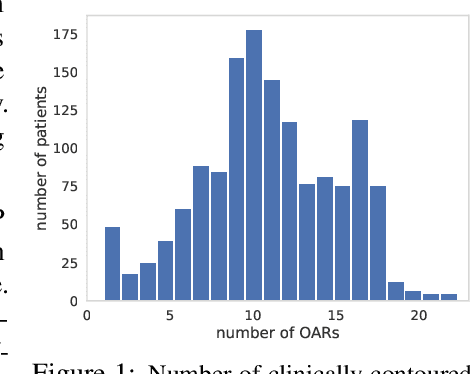
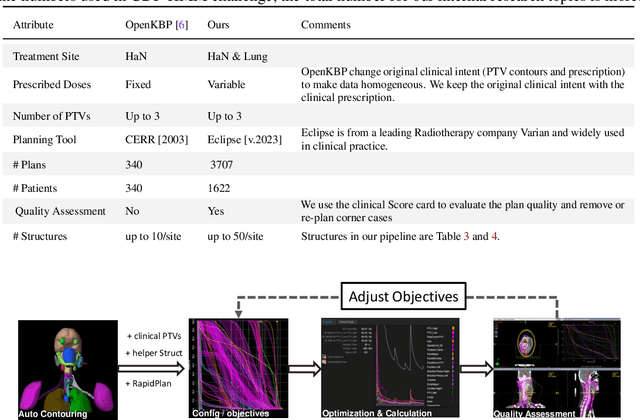
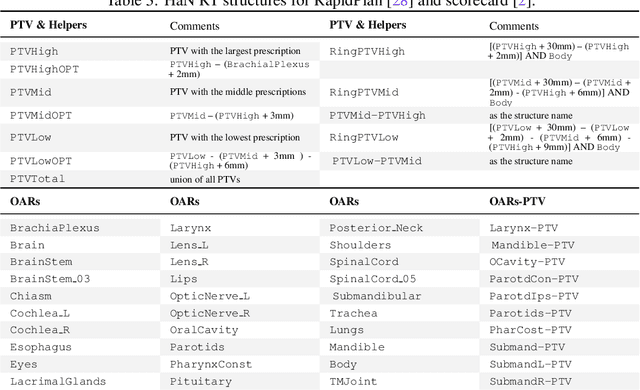
Radiotherapy (RT) planning is complex, subjective, and time-intensive. Advances in artificial intelligence (AI) promise to improve its precision, efficiency, and consistency, but progress is often limited by the scarcity of large, standardized datasets. To address this, we introduce the Automated Iterative RT Planning (AIRTP) system, a scalable solution for generating high-quality treatment plans. This scalable solution is designed to generate substantial volumes of consistently high-quality treatment plans, overcoming a key obstacle in the advancement of AI-driven RT planning. Our AIRTP pipeline adheres to clinical guidelines and automates essential steps, including organ-at-risk (OAR) contouring, helper structure creation, beam setup, optimization, and plan quality improvement, using AI integrated with RT planning software like Eclipse of Varian. Furthermore, a novel approach for determining optimization parameters to reproduce 3D dose distributions, i.e. a method to convert dose predictions to deliverable treatment plans constrained by machine limitations. A comparative analysis of plan quality reveals that our automated pipeline produces treatment plans of quality comparable to those generated manually, which traditionally require several hours of labor per plan. Committed to public research, the first data release of our AIRTP pipeline includes nine cohorts covering head-and-neck and lung cancer sites to support an AAPM 2025 challenge. This data set features more than 10 times the number of plans compared to the largest existing well-curated public data set to our best knowledge. Repo:{https://github.com/RiqiangGao/GDP-HMM_AAPMChallenge}
Deep Adversarial Context-Aware Landmark Detection for Ultrasound Imaging
May 28, 2018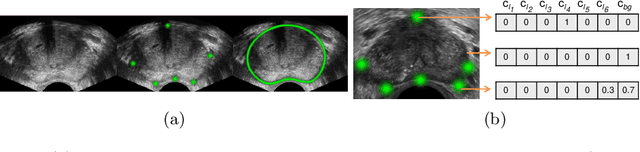

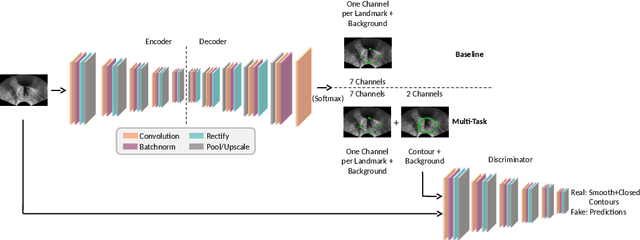
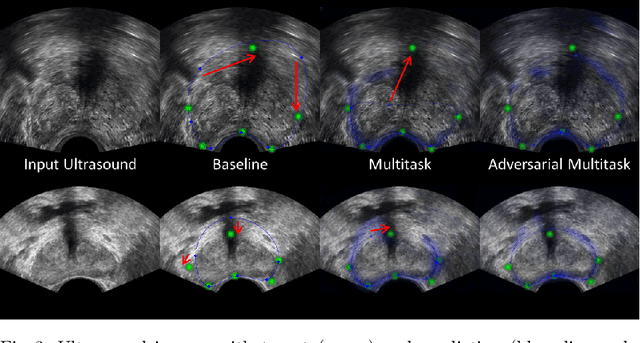
Real-time localization of prostate gland in trans-rectal ultrasound images is a key technology that is required to automate the ultrasound guided prostate biopsy procedures. In this paper, we propose a new deep learning based approach which is aimed at localizing several prostate landmarks efficiently and robustly. We propose a multitask learning approach primarily to make the overall algorithm more contextually aware. In this approach, we not only consider the explicit learning of landmark locations, but also build-in a mechanism to learn the contour of the prostate. This multitask learning is further coupled with an adversarial arm to promote the generation of feasible structures. We have trained this network using ~4000 labeled trans-rectal ultrasound images and tested on an independent set of images with ground truth landmark locations. We have achieved an overall Dice score of 92.6% for the adversarially trained multitask approach, which is significantly better than the Dice score of 88.3% obtained by only learning of landmark locations. The overall mean distance error using the adversarial multitask approach has also improved by 20% while reducing the standard deviation of the error compared to learning landmark locations only. In terms of computational complexity both approaches can process the images in real-time using standard computer with a standard CUDA enabled GPU.