 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePRANet: Point Cloud Registration with an Artificial Agent
Sep 23, 2021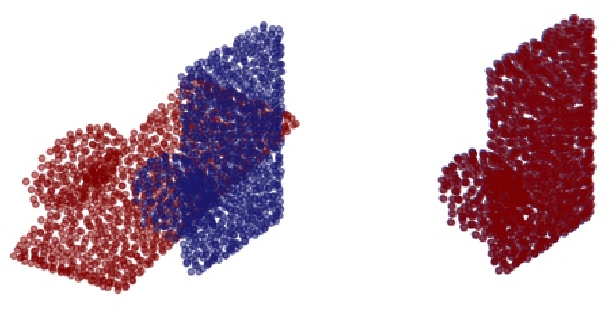

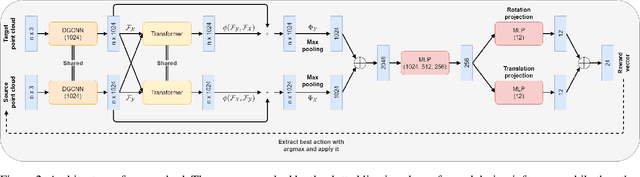
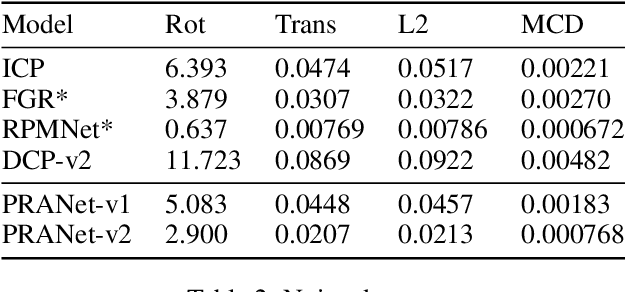
Point cloud registration plays a critical role in a multitude of computer vision tasks, such as pose estimation and 3D localization. Recently, a plethora of deep learning methods were formulated that aim to tackle this problem. Most of these approaches find point or feature correspondences, from which the transformations are computed. We give a different perspective and frame the registration problem as a Markov Decision Process. Instead of directly searching for the transformation, the problem becomes one of finding a sequence of translation and rotation actions that is equivalent to this transformation. To this end, we propose an artificial agent trained end-to-end using deep supervised learning. In contrast to conventional reinforcement learning techniques, the observations are sampled i.i.d. and thus no experience replay buffer is required, resulting in a more streamlined training process. Experiments on ModelNet40 show results comparable or superior to the state of the art in the case of clean, noisy and partially visible datasets.
Deep Adversarial Context-Aware Landmark Detection for Ultrasound Imaging
May 28, 2018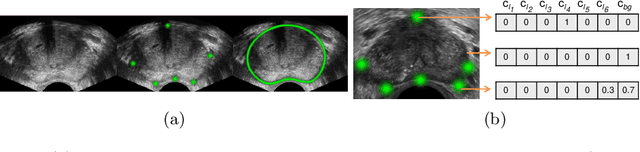

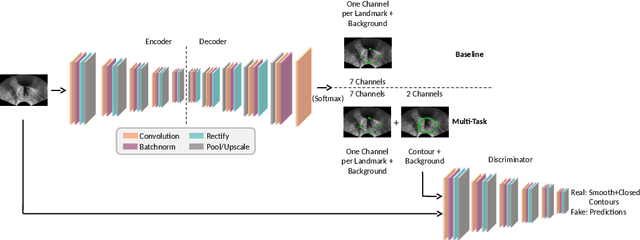
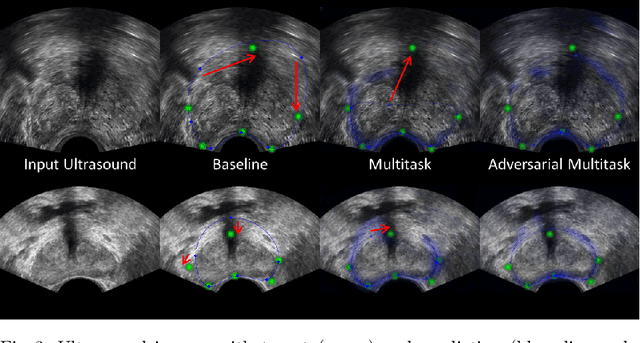
Real-time localization of prostate gland in trans-rectal ultrasound images is a key technology that is required to automate the ultrasound guided prostate biopsy procedures. In this paper, we propose a new deep learning based approach which is aimed at localizing several prostate landmarks efficiently and robustly. We propose a multitask learning approach primarily to make the overall algorithm more contextually aware. In this approach, we not only consider the explicit learning of landmark locations, but also build-in a mechanism to learn the contour of the prostate. This multitask learning is further coupled with an adversarial arm to promote the generation of feasible structures. We have trained this network using ~4000 labeled trans-rectal ultrasound images and tested on an independent set of images with ground truth landmark locations. We have achieved an overall Dice score of 92.6% for the adversarially trained multitask approach, which is significantly better than the Dice score of 88.3% obtained by only learning of landmark locations. The overall mean distance error using the adversarial multitask approach has also improved by 20% while reducing the standard deviation of the error compared to learning landmark locations only. In terms of computational complexity both approaches can process the images in real-time using standard computer with a standard CUDA enabled GPU.
Dilated FCN for Multi-Agent 2D/3D Medical Image Registration
Nov 22, 2017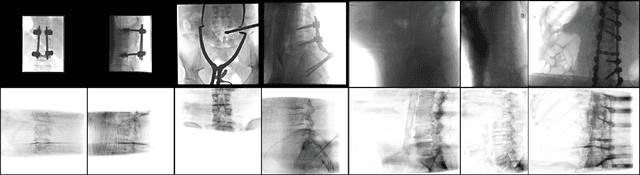
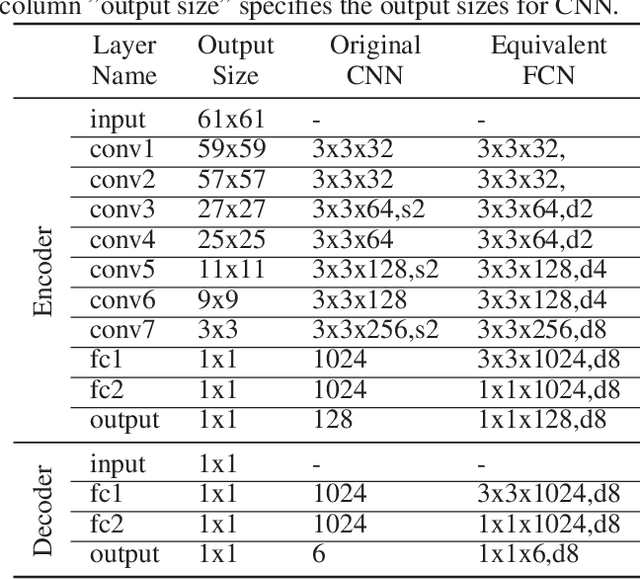
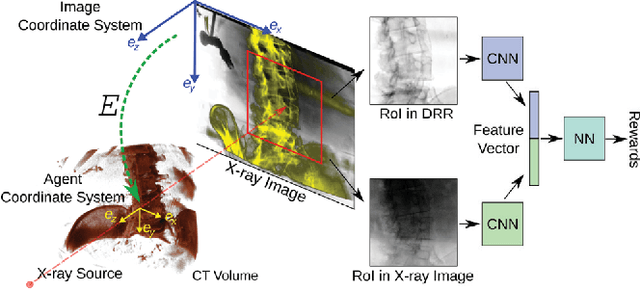
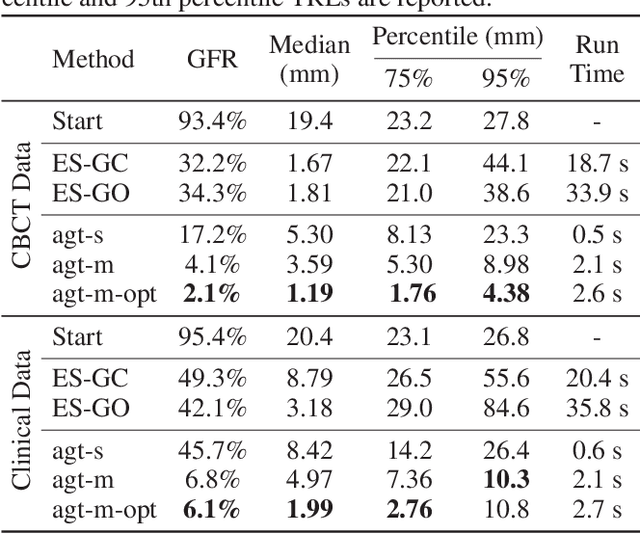
2D/3D image registration to align a 3D volume and 2D X-ray images is a challenging problem due to its ill-posed nature and various artifacts presented in 2D X-ray images. In this paper, we propose a multi-agent system with an auto attention mechanism for robust and efficient 2D/3D image registration. Specifically, an individual agent is trained with dilated Fully Convolutional Network (FCN) to perform registration in a Markov Decision Process (MDP) by observing a local region, and the final action is then taken based on the proposals from multiple agents and weighted by their corresponding confidence levels. The contributions of this paper are threefold. First, we formulate 2D/3D registration as a MDP with observations, actions, and rewards properly defined with respect to X-ray imaging systems. Second, to handle various artifacts in 2D X-ray images, multiple local agents are employed efficiently via FCN-based structures, and an auto attention mechanism is proposed to favor the proposals from regions with more reliable visual cues. Third, a dilated FCN-based training mechanism is proposed to significantly reduce the Degree of Freedom in the simulation of registration environment, and drastically improve training efficiency by an order of magnitude compared to standard CNN-based training method. We demonstrate that the proposed method achieves high robustness on both spine cone beam Computed Tomography data with a low signal-to-noise ratio and data from minimally invasive spine surgery where severe image artifacts and occlusions are presented due to metal screws and guide wires, outperforming other state-of-the-art methods (single agent-based and optimization-based) by a large margin.