 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePRANet: Point Cloud Registration with an Artificial Agent
Paper and Code
Sep 23, 2021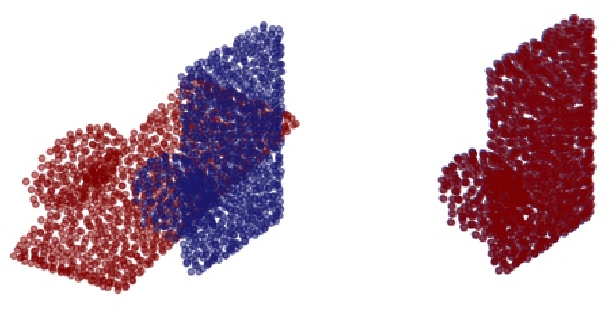

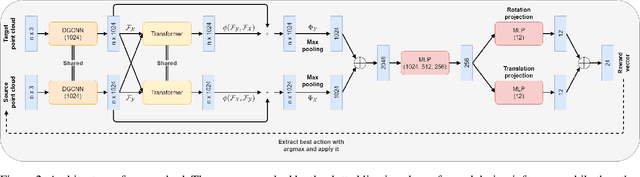
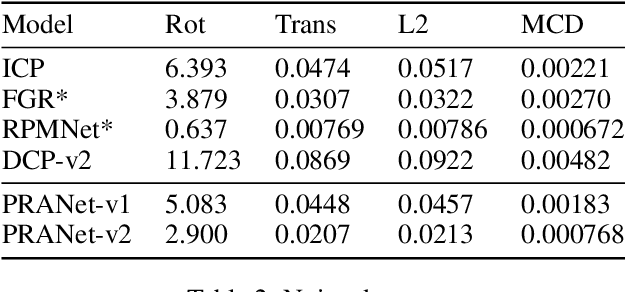
Point cloud registration plays a critical role in a multitude of computer vision tasks, such as pose estimation and 3D localization. Recently, a plethora of deep learning methods were formulated that aim to tackle this problem. Most of these approaches find point or feature correspondences, from which the transformations are computed. We give a different perspective and frame the registration problem as a Markov Decision Process. Instead of directly searching for the transformation, the problem becomes one of finding a sequence of translation and rotation actions that is equivalent to this transformation. To this end, we propose an artificial agent trained end-to-end using deep supervised learning. In contrast to conventional reinforcement learning techniques, the observations are sampled i.i.d. and thus no experience replay buffer is required, resulting in a more streamlined training process. Experiments on ModelNet40 show results comparable or superior to the state of the art in the case of clean, noisy and partially visible datasets.