 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edgekabr-tools: Automated Framework for Multi-Species Behavioral Monitoring
Oct 02, 2025A comprehensive understanding of animal behavior ecology depends on scalable approaches to quantify and interpret complex, multidimensional behavioral patterns. Traditional field observations are often limited in scope, time-consuming, and labor-intensive, hindering the assessment of behavioral responses across landscapes. To address this, we present kabr-tools (Kenyan Animal Behavior Recognition Tools), an open-source package for automated multi-species behavioral monitoring. This framework integrates drone-based video with machine learning systems to extract behavioral, social, and spatial metrics from wildlife footage. Our pipeline leverages object detection, tracking, and behavioral classification systems to generate key metrics, including time budgets, behavioral transitions, social interactions, habitat associations, and group composition dynamics. Compared to ground-based methods, drone-based observations significantly improved behavioral granularity, reducing visibility loss by 15% and capturing more transitions with higher accuracy and continuity. We validate kabr-tools through three case studies, analyzing 969 behavioral sequences, surpassing the capacity of traditional methods for data capture and annotation. We found that, like Plains zebras, vigilance in Grevy's zebras decreases with herd size, but, unlike Plains zebras, habitat has a negligible impact. Plains and Grevy's zebras exhibit strong behavioral inertia, with rare transitions to alert behaviors and observed spatial segregation between Grevy's zebras, Plains zebras, and giraffes in mixed-species herds. By enabling automated behavioral monitoring at scale, kabr-tools offers a powerful tool for ecosystem-wide studies, advancing conservation, biodiversity research, and ecological monitoring.
Building Machine Learning Challenges for Anomaly Detection in Science
Mar 03, 2025



Scientific discoveries are often made by finding a pattern or object that was not predicted by the known rules of science. Oftentimes, these anomalous events or objects that do not conform to the norms are an indication that the rules of science governing the data are incomplete, and something new needs to be present to explain these unexpected outliers. The challenge of finding anomalies can be confounding since it requires codifying a complete knowledge of the known scientific behaviors and then projecting these known behaviors on the data to look for deviations. When utilizing machine learning, this presents a particular challenge since we require that the model not only understands scientific data perfectly but also recognizes when the data is inconsistent and out of the scope of its trained behavior. In this paper, we present three datasets aimed at developing machine learning-based anomaly detection for disparate scientific domains covering astrophysics, genomics, and polar science. We present the different datasets along with a scheme to make machine learning challenges around the three datasets findable, accessible, interoperable, and reusable (FAIR). Furthermore, we present an approach that generalizes to future machine learning challenges, enabling the possibility of large, more compute-intensive challenges that can ultimately lead to scientific discovery.
Integrating Biological Data into Autonomous Remote Sensing Systems for In Situ Imageomics: A Case Study for Kenyan Animal Behavior Sensing with Unmanned Aerial Vehicles (UAVs)
Jul 23, 2024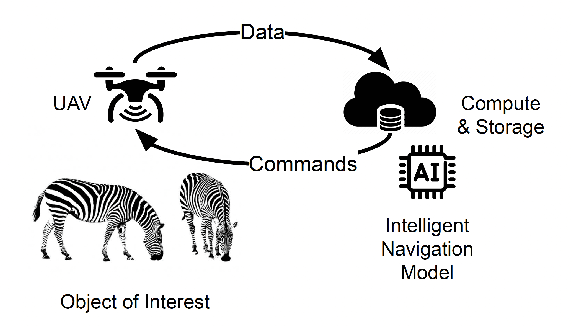



In situ imageomics leverages machine learning techniques to infer biological traits from images collected in the field, or in situ, to study individuals organisms, groups of wildlife, and whole ecosystems. Such datasets provide real-time social and environmental context to inferred biological traits, which can enable new, data-driven conservation and ecosystem management. The development of machine learning techniques to extract biological traits from images are impeded by the volume and quality data required to train these models. Autonomous, unmanned aerial vehicles (UAVs), are well suited to collect in situ imageomics data as they can traverse remote terrain quickly to collect large volumes of data with greater consistency and reliability compared to manually piloted UAV missions. However, little guidance exists on optimizing autonomous UAV missions for the purposes of remote sensing for conservation and biodiversity monitoring. The UAV video dataset curated by KABR: In-Situ Dataset for Kenyan Animal Behavior Recognition from Drone Videos required three weeks to collect, a time-consuming and expensive endeavor. Our analysis of KABR revealed that a third of the videos gathered were unusable for the purposes of inferring wildlife behavior. We analyzed the flight telemetry data from portions of UAV videos that were usable for inferring wildlife behavior, and demonstrate how these insights can be integrated into an autonomous remote sensing system to track wildlife in real time. Our autonomous remote sensing system optimizes the UAV's actions to increase the yield of usable data, and matches the flight path of an expert pilot with an 87% accuracy rate, representing an 18.2% improvement in accuracy over previously proposed methods.
BaboonLand Dataset: Tracking Primates in the Wild and Automating Behaviour Recognition from Drone Videos
May 29, 2024



Using drones to track multiple individuals simultaneously in their natural environment is a powerful approach for better understanding group primate behavior. Previous studies have demonstrated that it is possible to automate the classification of primate behavior from video data, but these studies have been carried out in captivity or from ground-based cameras. To understand group behavior and the self-organization of a collective, the whole troop needs to be seen at a scale where behavior can be seen in relation to the natural environment in which ecological decisions are made. This study presents a novel dataset from drone videos for baboon detection, tracking, and behavior recognition. The baboon detection dataset was created by manually annotating all baboons in drone videos with bounding boxes. A tiling method was subsequently applied to create a pyramid of images at various scales from the original 5.3K resolution images, resulting in approximately 30K images used for baboon detection. The tracking dataset is derived from the detection dataset, where all bounding boxes are assigned the same ID throughout the video. This process resulted in half an hour of very dense tracking data. The behavior recognition dataset was generated by converting tracks into mini-scenes, a video subregion centered on each animal; each mini-scene was manually annotated with 12 distinct behavior types, resulting in over 20 hours of data. Benchmark results show mean average precision (mAP) of 92.62\% for the YOLOv8-X detection model, multiple object tracking precision (MOTA) of 63.81\% for the BotSort tracking algorithm, and micro top-1 accuracy of 63.97\% for the X3D behavior recognition model. Using deep learning to classify wildlife behavior from drone footage facilitates non-invasive insight into the collective behavior of an entire group.