 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSegmentAnyTreeV2: Scaling Transformer-Based Tree Instance Segmentation Across Sensors, Platforms, and Forests
Jun 06, 2026We present SegmentAnyTreeV2, a sensor- and platform-agnostic framework for semantic and instance segmentation of forest point clouds. The model combines a serialization-based Point Transformer v3 backbone with a lightweight semantic head and a tree-focused cross-attention mask decoder. Semantic predictions restrict instance decoding to tree-class voxels, while instance-aware query initialization, one-to-many seed supervision, and asymmetric mask scoring improve separation in dense and structurally complex stands. We further introduce FOR-instance v3, an expanded benchmark comprising 427 scenes and 26,496 annotated trees across diverse biomes, forest structures, and LiDAR platforms. On the FOR-instanceV2 test split, SegmentAnyTreeV2 achieves 90.5% precision, 80.2% recall, 85.0% F1, 90.7% coverage, and 87.6% semantic mIoU, outperforming previous learning-based methods in both instance detection and mask completeness. Zero-shot evaluation on independent sites further demonstrates strong cross-domain generalization.
ARCANE-PedSynth: Synthetic Multi-Pedestrian Datasets with Behavioural Crossing Annotations
May 24, 2026We present ARCANE-PedSynth, an open-source CARLA-based software framework for generating synthetic multi-pedestrian datasets with dense behavioural annotations for pedestrian crossing prediction in autonomous driving. The framework overcomes CARLA's native 9% crossing rate through a hybrid AI-manual pedestrian control architecture, enabling configurable target rates up to 75%. A 12-state behavioural finite state machine with five character archetypes produces diverse crossing behaviours. The framework generates synchronised RGB, LiDAR, and DVS data with per-frame crossing labels, behavioural states, and estimated 2D pose keypoints. We demonstrate ARCANE-PedSynth through PedSynth++, an example dataset generated with the framework, comprising 533 multi-pedestrian clips across 12 weather conditions with RGB, LiDAR, and DVS streams. ARCANE-PedSynth is fully reproducible via CLI parameterisation and Docker containerisation.
Compression and Inference of Spiking Neural Networks on Resource-Constrained Hardware
Nov 15, 2025Spiking neural networks (SNNs) communicate via discrete spikes in time rather than continuous activations. Their event-driven nature offers advantages for temporal processing and energy efficiency on resource-constrained hardware, but training and deployment remain challenging. We present a lightweight C-based runtime for SNN inference on edge devices and optimizations that reduce latency and memory without sacrificing accuracy. Trained models exported from SNNTorch are translated to a compact C representation; static, cache-friendly data layouts and preallocation avoid interpreter and allocation overheads. We further exploit sparse spiking activity to prune inactive neurons and synapses, shrinking computation in upstream convolutional layers. Experiments on N-MNIST and ST-MNIST show functional parity with the Python baseline while achieving ~10 speedups on desktop CPU and additional gains with pruning, together with large memory reductions that enable microcontroller deployment (Arduino Portenta H7). Results indicate that SNNs can be executed efficiently on conventional embedded platforms when paired with an optimized runtime and spike-driven model compression. Code: https://github.com/karol-jurzec/snn-generator/
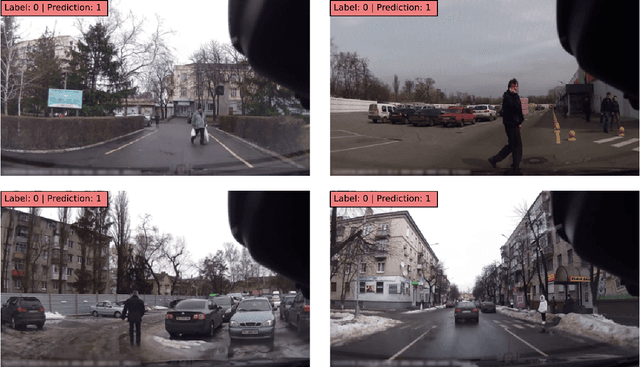
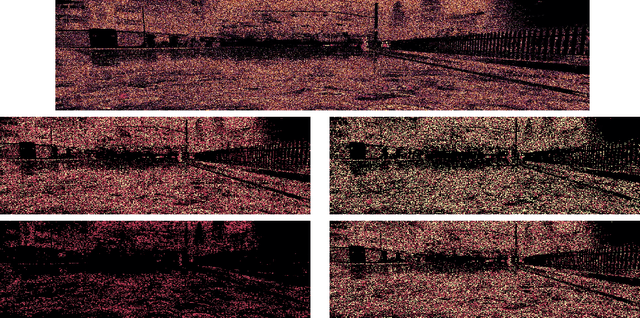
DVS-PedX: Synthetic-and-Real Event-Based Pedestrian Dataset
Sep 04, 2025Event cameras like Dynamic Vision Sensors (DVS) report micro-timed brightness changes instead of full frames, offering low latency, high dynamic range, and motion robustness. DVS-PedX (Dynamic Vision Sensor Pedestrian eXploration) is a neuromorphic dataset designed for pedestrian detection and crossing-intention analysis in normal and adverse weather conditions across two complementary sources: (1) synthetic event streams generated in the CARLA simulator for controlled "approach-cross" scenes under varied weather and lighting; and (2) real-world JAAD dash-cam videos converted to event streams using the v2e tool, preserving natural behaviors and backgrounds. Each sequence includes paired RGB frames, per-frame DVS "event frames" (33 ms accumulations), and frame-level labels (crossing vs. not crossing). We also provide raw AEDAT 2.0/AEDAT 4.0 event files and AVI DVS video files and metadata for flexible re-processing. Baseline spiking neural networks (SNNs) using SpikingJelly illustrate dataset usability and reveal a sim-to-real gap, motivating domain adaptation and multimodal fusion. DVS-PedX aims to accelerate research in event-based pedestrian safety, intention prediction, and neuromorphic perception.
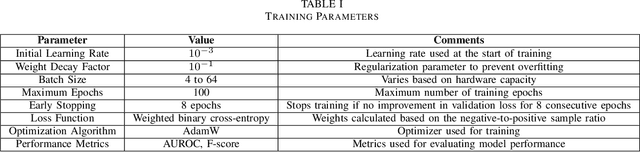
Spatiotemporal Analysis of Forest Machine Operations Using 3D Video Classification
May 30, 2025This paper presents a deep learning-based framework for classifying forestry operations from dashcam video footage. Focusing on four key work elements - crane-out, cutting-and-to-processing, driving, and processing - the approach employs a 3D ResNet-50 architecture implemented with PyTorchVideo. Trained on a manually annotated dataset of field recordings, the model achieves strong performance, with a validation F1 score of 0.88 and precision of 0.90. These results underscore the effectiveness of spatiotemporal convolutional networks for capturing both motion patterns and appearance in real-world forestry environments. The system integrates standard preprocessing and augmentation techniques to improve generalization, but overfitting is evident, highlighting the need for more training data and better class balance. Despite these challenges, the method demonstrates clear potential for reducing the manual workload associated with traditional time studies, offering a scalable solution for operational monitoring and efficiency analysis in forestry. This work contributes to the growing application of AI in natural resource management and sets the foundation for future systems capable of real-time activity recognition in forest machinery. Planned improvements include dataset expansion, enhanced regularization, and deployment trials on embedded systems for in-field use.
Three-Factor Learning in Spiking Neural Networks: An Overview of Methods and Trends from a Machine Learning Perspective
Apr 06, 2025Three-factor learning rules in Spiking Neural Networks (SNNs) have emerged as a crucial extension to traditional Hebbian learning and Spike-Timing-Dependent Plasticity (STDP), incorporating neuromodulatory signals to improve adaptation and learning efficiency. These mechanisms enhance biological plausibility and facilitate improved credit assignment in artificial neural systems. This paper takes a view on this topic from a machine learning perspective, providing an overview of recent advances in three-factor learning, discusses theoretical foundations, algorithmic implementations, and their relevance to reinforcement learning and neuromorphic computing. In addition, we explore interdisciplinary approaches, scalability challenges, and potential applications in robotics, cognitive modeling, and AI systems. Finally, we highlight key research gaps and propose future directions for bridging the gap between neuroscience and artificial intelligence.
Pedestrian intention prediction in Adverse Weather Conditions with Spiking Neural Networks and Dynamic Vision Sensors
Jun 01, 2024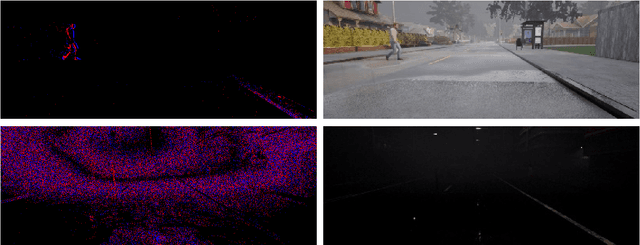
This study examines the effectiveness of Spiking Neural Networks (SNNs) paired with Dynamic Vision Sensors (DVS) to improve pedestrian detection in adverse weather, a significant challenge for autonomous vehicles. Utilizing the high temporal resolution and low latency of DVS, which excels in dynamic, low-light, and high-contrast environments, we assess the efficiency of SNNs compared to traditional Convolutional Neural Networks (CNNs). Our experiments involved testing across diverse weather scenarios using a custom dataset from the CARLA simulator, mirroring real-world variability. SNN models, enhanced with Temporally Effective Batch Normalization, were trained and benchmarked against state-of-the-art CNNs to demonstrate superior accuracy and computational efficiency in complex conditions such as rain and fog. The results indicate that SNNs, integrated with DVS, significantly reduce computational overhead and improve detection accuracy in challenging conditions compared to CNNs. This highlights the potential of DVS combined with bio-inspired SNN processing to enhance autonomous vehicle perception and decision-making systems, advancing intelligent transportation systems' safety features in varying operational environments. Additionally, our research indicates that SNNs perform more efficiently in handling long perception windows and prediction tasks, rather than simple pedestrian detection.
SegmentAnyTree: A sensor and platform agnostic deep learning model for tree segmentation using laser scanning data
Jan 28, 2024



This research advances individual tree crown (ITC) segmentation in lidar data, using a deep learning model applicable to various laser scanning types: airborne (ULS), terrestrial (TLS), and mobile (MLS). It addresses the challenge of transferability across different data characteristics in 3D forest scene analysis. The study evaluates the model's performance based on platform (ULS, MLS) and data density, testing five scenarios with varying input data, including sparse versions, to gauge adaptability and canopy layer efficacy. The model, based on PointGroup architecture, is a 3D CNN with separate heads for semantic and instance segmentation, validated on diverse point cloud datasets. Results show point cloud sparsification enhances performance, aiding sparse data handling and improving detection in dense forests. The model performs well with >50 points per sq. m densities but less so at 10 points per sq. m due to higher omission rates. It outperforms existing methods (e.g., Point2Tree, TLS2trees) in detection, omission, commission rates, and F1 score, setting new benchmarks on LAUTx, Wytham Woods, and TreeLearn datasets. In conclusion, this study shows the feasibility of a sensor-agnostic model for diverse lidar data, surpassing sensor-specific approaches and setting new standards in tree segmentation, particularly in complex forests. This contributes to future ecological modeling and forest management advancements.
Synthetic Data Generation Framework, Dataset, and Efficient Deep Model for Pedestrian Intention Prediction
Jan 12, 2024
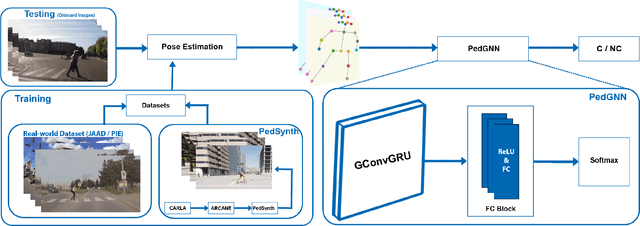


Pedestrian intention prediction is crucial for autonomous driving. In particular, knowing if pedestrians are going to cross in front of the ego-vehicle is core to performing safe and comfortable maneuvers. Creating accurate and fast models that predict such intentions from sequential images is challenging. A factor contributing to this is the lack of datasets with diverse crossing and non-crossing (C/NC) scenarios. We address this scarceness by introducing a framework, named ARCANE, which allows programmatically generating synthetic datasets consisting of C/NC video clip samples. As an example, we use ARCANE to generate a large and diverse dataset named PedSynth. We will show how PedSynth complements widely used real-world datasets such as JAAD and PIE, so enabling more accurate models for C/NC prediction. Considering the onboard deployment of C/NC prediction models, we also propose a deep model named PedGNN, which is fast and has a very low memory footprint. PedGNN is based on a GNN-GRU architecture that takes a sequence of pedestrian skeletons as input to predict crossing intentions.
Automated forest inventory: analysis of high-density airborne LiDAR point clouds with 3D deep learning
Dec 22, 2023



Detailed forest inventories are critical for sustainable and flexible management of forest resources, to conserve various ecosystem services. Modern airborne laser scanners deliver high-density point clouds with great potential for fine-scale forest inventory and analysis, but automatically partitioning those point clouds into meaningful entities like individual trees or tree components remains a challenge. The present study aims to fill this gap and introduces a deep learning framework that is able to perform such a segmentation across diverse forest types and geographic regions. From the segmented data, we then derive relevant biophysical parameters of individual trees as well as stands. The system has been tested on FOR-Instance, a dataset of point clouds that have been acquired in five different countries using surveying drones. The segmentation back-end achieves over 85% F-score for individual trees, respectively over 73% mean IoU across five semantic categories: ground, low vegetation, stems, live branches and dead branches. Building on the segmentation results our pipeline then densely calculates biophysical features of each individual tree (height, crown diameter, crown volume, DBH, and location) and properties per stand (digital terrain model and stand density). Especially crown-related features are in most cases retrieved with high accuracy, whereas the estimates for DBH and location are less reliable, due to the airborne scanning setup.