 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeARCANE-PedSynth: Synthetic Multi-Pedestrian Datasets with Behavioural Crossing Annotations
May 24, 2026We present ARCANE-PedSynth, an open-source CARLA-based software framework for generating synthetic multi-pedestrian datasets with dense behavioural annotations for pedestrian crossing prediction in autonomous driving. The framework overcomes CARLA's native 9% crossing rate through a hybrid AI-manual pedestrian control architecture, enabling configurable target rates up to 75%. A 12-state behavioural finite state machine with five character archetypes produces diverse crossing behaviours. The framework generates synchronised RGB, LiDAR, and DVS data with per-frame crossing labels, behavioural states, and estimated 2D pose keypoints. We demonstrate ARCANE-PedSynth through PedSynth++, an example dataset generated with the framework, comprising 533 multi-pedestrian clips across 12 weather conditions with RGB, LiDAR, and DVS streams. ARCANE-PedSynth is fully reproducible via CLI parameterisation and Docker containerisation.
Synthetic Data Generation Framework, Dataset, and Efficient Deep Model for Pedestrian Intention Prediction
Jan 12, 2024
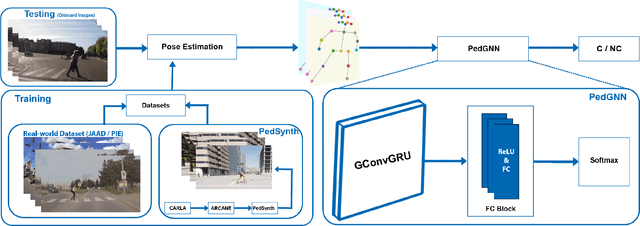


Pedestrian intention prediction is crucial for autonomous driving. In particular, knowing if pedestrians are going to cross in front of the ego-vehicle is core to performing safe and comfortable maneuvers. Creating accurate and fast models that predict such intentions from sequential images is challenging. A factor contributing to this is the lack of datasets with diverse crossing and non-crossing (C/NC) scenarios. We address this scarceness by introducing a framework, named ARCANE, which allows programmatically generating synthetic datasets consisting of C/NC video clip samples. As an example, we use ARCANE to generate a large and diverse dataset named PedSynth. We will show how PedSynth complements widely used real-world datasets such as JAAD and PIE, so enabling more accurate models for C/NC prediction. Considering the onboard deployment of C/NC prediction models, we also propose a deep model named PedGNN, which is fast and has a very low memory footprint. PedGNN is based on a GNN-GRU architecture that takes a sequence of pedestrian skeletons as input to predict crossing intentions.
CARLA-BSP: a simulated dataset with pedestrians
Apr 29, 2023We present a sample dataset featuring pedestrians generated using the ARCANE framework, a new framework for generating datasets in CARLA (0.9.13). We provide use cases for pedestrian detection, autoencoding, pose estimation, and pose lifting. We also showcase baseline results. For more information, visit https://project-arcane.eu/.