 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIsaac Lab: A GPU-Accelerated Simulation Framework for Multi-Modal Robot Learning
Nov 06, 2025



We present Isaac Lab, the natural successor to Isaac Gym, which extends the paradigm of GPU-native robotics simulation into the era of large-scale multi-modal learning. Isaac Lab combines high-fidelity GPU parallel physics, photorealistic rendering, and a modular, composable architecture for designing environments and training robot policies. Beyond physics and rendering, the framework integrates actuator models, multi-frequency sensor simulation, data collection pipelines, and domain randomization tools, unifying best practices for reinforcement and imitation learning at scale within a single extensible platform. We highlight its application to a diverse set of challenges, including whole-body control, cross-embodiment mobility, contact-rich and dexterous manipulation, and the integration of human demonstrations for skill acquisition. Finally, we discuss upcoming integration with the differentiable, GPU-accelerated Newton physics engine, which promises new opportunities for scalable, data-efficient, and gradient-based approaches to robot learning. We believe Isaac Lab's combination of advanced simulation capabilities, rich sensing, and data-center scale execution will help unlock the next generation of breakthroughs in robotics research.
UKAN: Unbound Kolmogorov-Arnold Network Accompanied with Accelerated Library
Aug 20, 2024



In this work, we present a GPU-accelerated library for the underlying components of Kolmogorov-Arnold Networks (KANs), along with an algorithm to eliminate bounded grids in KANs. The GPU-accelerated library reduces the computational complexity of Basis Spline (B-spline) evaluation by a factor of $\mathcal{O}$(grid size) compared to existing codes, enabling batch computation for large-scale learning. To overcome the limitations of traditional KANs, we introduce Unbounded KANs (UKANs), which eliminate the need for a bounded grid and a fixed number of B-spline coefficients. To do so, we replace the KAN parameters (B-spline coefficients) with a coefficient generator (CG) model. The inputs to the CG model are designed based on the idea of an infinite symmetric grid extending from negative infinity to positive infinity. The positional encoding of grid group, a sequential collection of B-spline grid indexes, is fed into the CG model, and coefficients are consumed by the efficient implementation (matrix representations) of B-spline functions to generate outputs. We perform several experiments on regression, classification, and generative tasks, which are promising. In particular, UKAN does not require data normalization or a bounded domain for evaluation. Additionally, our benchmarking results indicate the superior memory and computational efficiency of our library compared to existing codes.
Factory: Fast Contact for Robotic Assembly
May 07, 2022
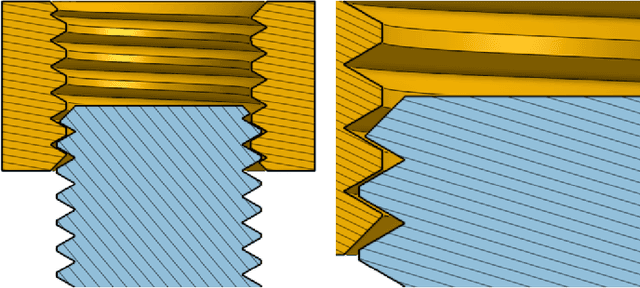
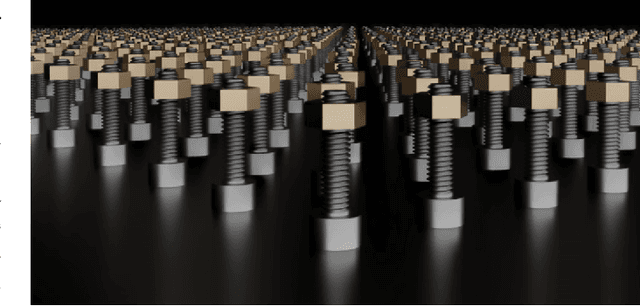
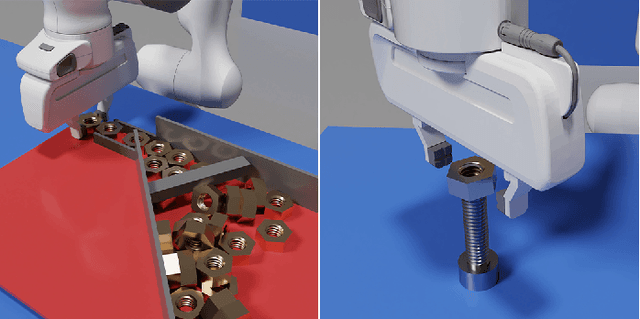
Robotic assembly is one of the oldest and most challenging applications of robotics. In other areas of robotics, such as perception and grasping, simulation has rapidly accelerated research progress, particularly when combined with modern deep learning. However, accurately, efficiently, and robustly simulating the range of contact-rich interactions in assembly remains a longstanding challenge. In this work, we present Factory, a set of physics simulation methods and robot learning tools for such applications. We achieve real-time or faster simulation of a wide range of contact-rich scenes, including simultaneous simulation of 1000 nut-and-bolt interactions. We provide $60$ carefully-designed part models, 3 robotic assembly environments, and 7 robot controllers for training and testing virtual robots. Finally, we train and evaluate proof-of-concept reinforcement learning policies for nut-and-bolt assembly. We aim for Factory to open the doors to using simulation for robotic assembly, as well as many other contact-rich applications in robotics. Please see https://sites.google.com/nvidia.com/factory for supplementary content, including videos.
Isaac Gym: High Performance GPU-Based Physics Simulation For Robot Learning
Aug 25, 2021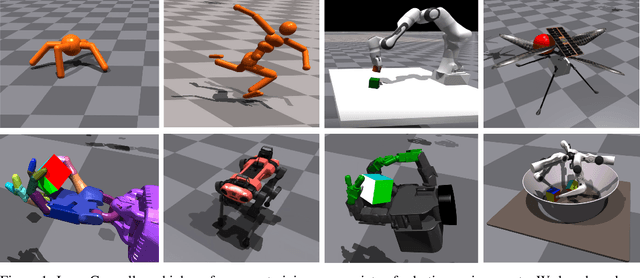
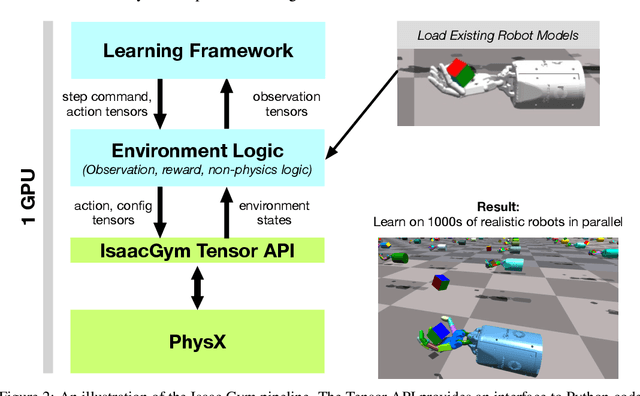
Isaac Gym offers a high performance learning platform to train policies for wide variety of robotics tasks directly on GPU. Both physics simulation and the neural network policy training reside on GPU and communicate by directly passing data from physics buffers to PyTorch tensors without ever going through any CPU bottlenecks. This leads to blazing fast training times for complex robotics tasks on a single GPU with 2-3 orders of magnitude improvements compared to conventional RL training that uses a CPU based simulator and GPU for neural networks. We host the results and videos at \url{https://sites.google.com/view/isaacgym-nvidia} and isaac gym can be downloaded at \url{https://developer.nvidia.com/isaac-gym}.