 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAchieving the Kesten-Stigum bound in the non-uniform hypergraph stochastic block model
Apr 21, 2026We study the community detection problem in the non-uniform hypergraph stochastic block model (HSBM), where hyperedges of varying sizes coexist. This setting captures higher-order and multi-view interactions and raises a fundamental question: can multiple uniform hypergraph layers below the detection threshold be combined to enable weak recovery? We answer this question by establishing a Kesten--Stigum-type bound for weak recovery in a general class of non-uniform HSBMs with $r$ blocks, generated according to multiple symmetric probability tensors. In the case $r=2$, we show that weak recovery is possible whenever the sum of the signal-to-noise ratios across all uniform hypergraph layers exceeds one, thereby confirming the positive part of a conjecture in (Chodrow et al., 2023). Moreover, we provide a polynomial-time spectral algorithm that achieves this threshold via an optimally weighted non-backtracking operator. For the unweighted non-backtracking matrix, our spectral method attains a different algorithmic threshold, also conjectured in (Chodrow et al., 2023). Our approach develops a spectral theory for weighted non-backtracking operators on non-uniform hypergraphs, including a precise characterization of outlier eigenvalues and eigenvector overlaps. We introduce a novel Ihara--Bass formula tailored to weighted non-uniform hypergraphs, which yields an efficient low-dimensional representation and leads to a provable spectral reconstruction algorithm. Taken together, these results provide a principled and computationally efficient approach to clustering in non-uniform hypergraphs, and highlight the role of optimal weighting in aggregating heterogeneous higher-order interactions.
Wedge Sampling: Efficient Tensor Completion with Nearly-Linear Sample Complexity
Feb 05, 2026We introduce Wedge Sampling, a new non-adaptive sampling scheme for low-rank tensor completion. We study recovery of an order-$k$ low-rank tensor of dimension $n \times \cdots \times n$ from a subset of its entries. Unlike the standard uniform entry model (i.e., i.i.d. samples from $[n]^k$), wedge sampling allocates observations to structured length-two patterns (wedges) in an associated bipartite sampling graph. By directly promoting these length-two connections, the sampling design strengthens the spectral signal that underlies efficient initialization, in regimes where uniform sampling is too sparse to generate enough informative correlations. Our main result shows that this change in sampling paradigm enables polynomial-time algorithms to achieve both weak and exact recovery with nearly linear sample complexity in $n$. The approach is also plug-and-play: wedge-sampling-based spectral initialization can be combined with existing refinement procedures (e.g., spectral or gradient-based methods) using only an additional $\tilde{O}(n)$ uniformly sampled entries, substantially improving over the $\tilde{O}(n^{k/2})$ sample complexity typically required under uniform entry sampling for efficient methods. Overall, our results suggest that the statistical-to-computational gap highlighted in Barak and Moitra (2022) is, to a large extent, a consequence of the uniform entry sampling model for tensor completion, and that alternative non-adaptive measurement designs that guarantee a strong initialization can overcome this barrier.
Community detection with the Bethe-Hessian
Nov 05, 2024
The Bethe-Hessian matrix, introduced by Saade, Krzakala, and Zdeborov\'a (2014), is a Hermitian matrix designed for applying spectral clustering algorithms to sparse networks. Rather than employing a non-symmetric and high-dimensional non-backtracking operator, a spectral method based on the Bethe-Hessian matrix is conjectured to also reach the Kesten-Stigum detection threshold in the sparse stochastic block model (SBM). We provide the first rigorous analysis of the Bethe-Hessian spectral method in the SBM under both the bounded expected degree and the growing degree regimes. Specifically, we demonstrate that: (i) When the expected degree $d\geq 2$, the number of negative outliers of the Bethe-Hessian matrix can consistently estimate the number of blocks above the Kesten-Stigum threshold, thus confirming a conjecture from Saade, Krzakala, and Zdeborov\'a (2014) for $d\geq 2$. (ii) For sufficiently large $d$, its eigenvectors can be used to achieve weak recovery. (iii) As $d\to\infty$, we establish the concentration of the locations of its negative outlier eigenvalues, and weak consistency can be achieved via a spectral method based on the Bethe-Hessian matrix.
Online Learning and Information Exponents: On The Importance of Batch size, and Time/Complexity Tradeoffs
Jun 04, 2024We study the impact of the batch size $n_b$ on the iteration time $T$ of training two-layer neural networks with one-pass stochastic gradient descent (SGD) on multi-index target functions of isotropic covariates. We characterize the optimal batch size minimizing the iteration time as a function of the hardness of the target, as characterized by the information exponents. We show that performing gradient updates with large batches $n_b \lesssim d^{\frac{\ell}{2}}$ minimizes the training time without changing the total sample complexity, where $\ell$ is the information exponent of the target to be learned \citep{arous2021online} and $d$ is the input dimension. However, larger batch sizes than $n_b \gg d^{\frac{\ell}{2}}$ are detrimental for improving the time complexity of SGD. We provably overcome this fundamental limitation via a different training protocol, \textit{Correlation loss SGD}, which suppresses the auto-correlation terms in the loss function. We show that one can track the training progress by a system of low-dimensional ordinary differential equations (ODEs). Finally, we validate our theoretical results with numerical experiments.
Repetita Iuvant: Data Repetition Allows SGD to Learn High-Dimensional Multi-Index Functions
May 24, 2024Neural networks can identify low-dimensional relevant structures within high-dimensional noisy data, yet our mathematical understanding of how they do so remains scarce. Here, we investigate the training dynamics of two-layer shallow neural networks trained with gradient-based algorithms, and discuss how they learn pertinent features in multi-index models, that is target functions with low-dimensional relevant directions. In the high-dimensional regime, where the input dimension $d$ diverges, we show that a simple modification of the idealized single-pass gradient descent training scenario, where data can now be repeated or iterated upon twice, drastically improves its computational efficiency. In particular, it surpasses the limitations previously believed to be dictated by the Information and Leap exponents associated with the target function to be learned. Our results highlight the ability of networks to learn relevant structures from data alone without any pre-processing. More precisely, we show that (almost) all directions are learned with at most $O(d \log d)$ steps. Among the exceptions is a set of hard functions that includes sparse parities. In the presence of coupling between directions, however, these can be learned sequentially through a hierarchical mechanism that generalizes the notion of staircase functions. Our results are proven by a rigorous study of the evolution of the relevant statistics for high-dimensional dynamics.
Learning Two-Layer Neural Networks, One Step at a Time
May 29, 2023We study the training dynamics of shallow neural networks, investigating the conditions under which a limited number of large batch gradient descent steps can facilitate feature learning beyond the kernel regime. We compare the influence of batch size and that of multiple (but finitely many) steps. Our analysis of a single-step process reveals that while a batch size of $n = O(d)$ enables feature learning, it is only adequate for learning a single direction, or a single-index model. In contrast, $n = O(d^2)$ is essential for learning multiple directions and specialization. Moreover, we demonstrate that ``hard'' directions, which lack the first $\ell$ Hermite coefficients, remain unobserved and require a batch size of $n = O(d^\ell)$ for being captured by gradient descent. Upon iterating a few steps, the scenario changes: a batch-size of $n = O(d)$ is enough to learn new target directions spanning the subspace linearly connected in the Hermite basis to the previously learned directions, thereby a staircase property. Our analysis utilizes a blend of techniques related to concentration, projection-based conditioning, and Gaussian equivalence that are of independent interest. By determining the conditions necessary for learning and specialization, our results highlight the interaction between batch size and number of iterations, and lead to a hierarchical depiction where learning performance exhibits a stairway to accuracy over time and batch size, shedding new light on feature learning in neural networks.
Escaping mediocrity: how two-layer networks learn hard single-index models with SGD
May 29, 2023This study explores the sample complexity for two-layer neural networks to learn a single-index target function under Stochastic Gradient Descent (SGD), focusing on the challenging regime where many flat directions are present at initialization. It is well-established that in this scenario $n=O(d\log{d})$ samples are typically needed. However, we provide precise results concerning the pre-factors in high-dimensional contexts and for varying widths. Notably, our findings suggest that overparameterization can only enhance convergence by a constant factor within this problem class. These insights are grounded in the reduction of SGD dynamics to a stochastic process in lower dimensions, where escaping mediocrity equates to calculating an exit time. Yet, we demonstrate that a deterministic approximation of this process adequately represents the escape time, implying that the role of stochasticity may be minimal in this scenario.
Are Gaussian data all you need? Extents and limits of universality in high-dimensional generalized linear estimation
Feb 17, 2023
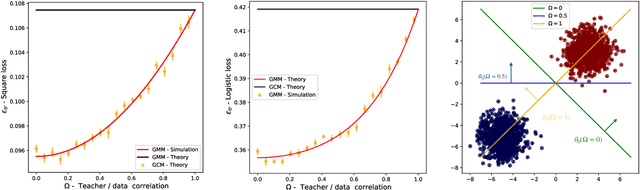
In this manuscript we consider the problem of generalized linear estimation on Gaussian mixture data with labels given by a single-index model. Our first result is a sharp asymptotic expression for the test and training errors in the high-dimensional regime. Motivated by the recent stream of results on the Gaussian universality of the test and training errors in generalized linear estimation, we ask ourselves the question: "when is a single Gaussian enough to characterize the error?". Our formula allow us to give sharp answers to this question, both in the positive and negative directions. More precisely, we show that the sufficient conditions for Gaussian universality (or lack of thereof) crucially depend on the alignment between the target weights and the means and covariances of the mixture clusters, which we precisely quantify. In the particular case of least-squares interpolation, we prove a strong universality property of the training error, and show it follows a simple, closed-form expression. Finally, we apply our results to real datasets, clarifying some recent discussion in the literature about Gaussian universality of the errors in this context.
Universality laws for Gaussian mixtures in generalized linear models
Feb 17, 2023Let $(x_{i}, y_{i})_{i=1,\dots,n}$ denote independent samples from a general mixture distribution $\sum_{c\in\mathcal{C}}\rho_{c}P_{c}^{x}$, and consider the hypothesis class of generalized linear models $\hat{y} = F(\Theta^{\top}x)$. In this work, we investigate the asymptotic joint statistics of the family of generalized linear estimators $(\Theta_{1}, \dots, \Theta_{M})$ obtained either from (a) minimizing an empirical risk $\hat{R}_{n}(\Theta;X,y)$ or (b) sampling from the associated Gibbs measure $\exp(-\beta n \hat{R}_{n}(\Theta;X,y))$. Our main contribution is to characterize under which conditions the asymptotic joint statistics of this family depends (on a weak sense) only on the means and covariances of the class conditional features distribution $P_{c}^{x}$. In particular, this allow us to prove the universality of different quantities of interest, such as the training and generalization errors, redeeming a recent line of work in high-dimensional statistics working under the Gaussian mixture hypothesis. Finally, we discuss the applications of our results to different machine learning tasks of interest, such as ensembling and uncertainty
From high-dimensional & mean-field dynamics to dimensionless ODEs: A unifying approach to SGD in two-layers networks
Feb 12, 2023This manuscript investigates the one-pass stochastic gradient descent (SGD) dynamics of a two-layer neural network trained on Gaussian data and labels generated by a similar, though not necessarily identical, target function. We rigorously analyse the limiting dynamics via a deterministic and low-dimensional description in terms of the sufficient statistics for the population risk. Our unifying analysis bridges different regimes of interest, such as the classical gradient-flow regime of vanishing learning rate, the high-dimensional regime of large input dimension, and the overparameterised "mean-field" regime of large network width, covering as well the intermediate regimes where the limiting dynamics is determined by the interplay between these behaviours. In particular, in the high-dimensional limit, the infinite-width dynamics is found to remain close to a low-dimensional subspace spanned by the target principal directions. Our results therefore provide a unifying picture of the limiting SGD dynamics with synthetic data.