 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn expert-driven data generation pipeline for histological images
Jun 03, 2024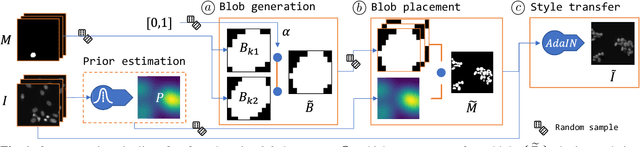

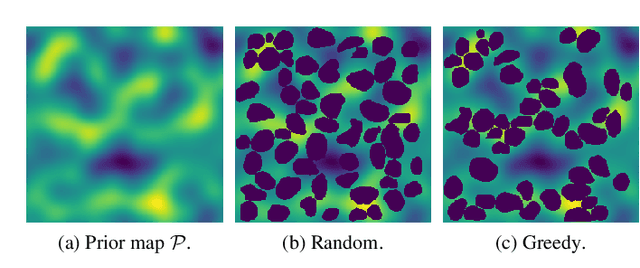
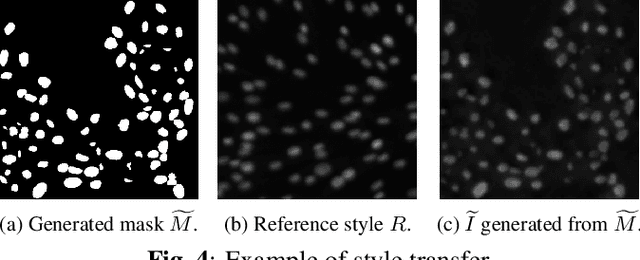
Deep Learning (DL) models have been successfully applied to many applications including biomedical cell segmentation and classification in histological images. These models require large amounts of annotated data which might not always be available, especially in the medical field where annotations are scarce and expensive. To overcome this limitation, we propose a novel pipeline for generating synthetic datasets for cell segmentation. Given only a handful of annotated images, our method generates a large dataset of images which can be used to effectively train DL instance segmentation models. Our solution is designed to generate cells of realistic shapes and placement by allowing experts to incorporate domain knowledge during the generation of the dataset.
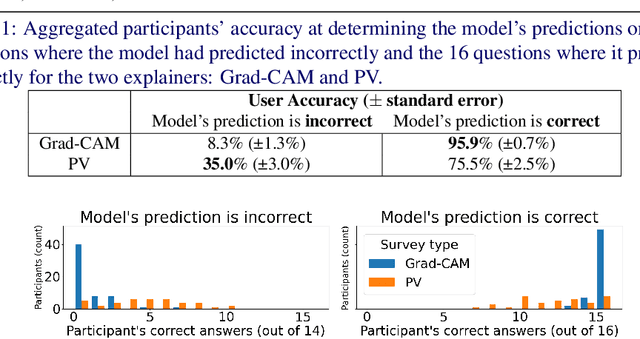
Concept Visualization: Explaining the CLIP Multi-modal Embedding Using WordNet
May 23, 2024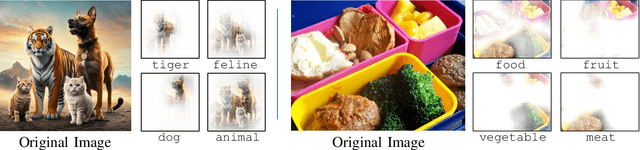


Advances in multi-modal embeddings, and in particular CLIP, have recently driven several breakthroughs in Computer Vision (CV). CLIP has shown impressive performance on a variety of tasks, yet, its inherently opaque architecture may hinder the application of models employing CLIP as backbone, especially in fields where trust and model explainability are imperative, such as in the medical domain. Current explanation methodologies for CV models rely on Saliency Maps computed through gradient analysis or input perturbation. However, these Saliency Maps can only be computed to explain classes relevant to the end task, often smaller in scope than the backbone training classes. In the context of models implementing CLIP as their vision backbone, a substantial portion of the information embedded within the learned representations is thus left unexplained. In this work, we propose Concept Visualization (ConVis), a novel saliency methodology that explains the CLIP embedding of an image by exploiting the multi-modal nature of the embeddings. ConVis makes use of lexical information from WordNet to compute task-agnostic Saliency Maps for any concept, not limited to concepts the end model was trained on. We validate our use of WordNet via an out of distribution detection experiment, and test ConVis on an object localization benchmark, showing that Concept Visualizations correctly identify and localize the image's semantic content. Additionally, we perform a user study demonstrating that our methodology can give users insight on the model's functioning.
Explaining Multi-modal Large Language Models by Analyzing their Vision Perception
May 23, 2024Multi-modal Large Language Models (MLLMs) have demonstrated remarkable capabilities in understanding and generating content across various modalities, such as images and text. However, their interpretability remains a challenge, hindering their adoption in critical applications. This research proposes a novel approach to enhance the interpretability of MLLMs by focusing on the image embedding component. We combine an open-world localization model with a MLLM, thus creating a new architecture able to simultaneously produce text and object localization outputs from the same vision embedding. The proposed architecture greatly promotes interpretability, enabling us to design a novel saliency map to explain any output token, to identify model hallucinations, and to assess model biases through semantic adversarial perturbations.
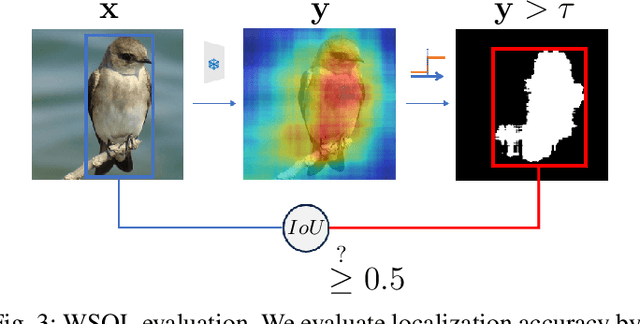
SE3D: A Framework For Saliency Method Evaluation In 3D Imaging
May 23, 2024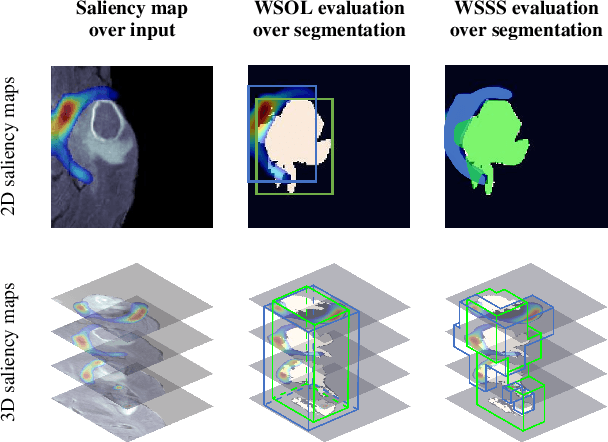
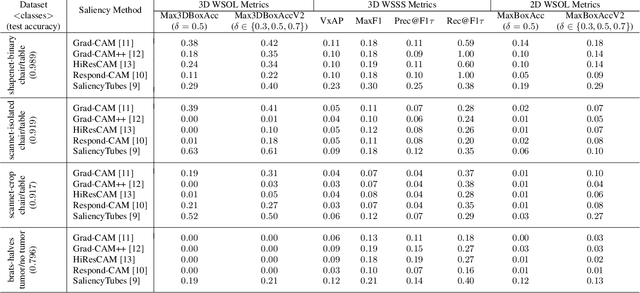


For more than a decade, deep learning models have been dominating in various 2D imaging tasks. Their application is now extending to 3D imaging, with 3D Convolutional Neural Networks (3D CNNs) being able to process LIDAR, MRI, and CT scans, with significant implications for fields such as autonomous driving and medical imaging. In these critical settings, explaining the model's decisions is fundamental. Despite recent advances in Explainable Artificial Intelligence, however, little effort has been devoted to explaining 3D CNNs, and many works explain these models via inadequate extensions of 2D saliency methods. One fundamental limitation to the development of 3D saliency methods is the lack of a benchmark to quantitatively assess them on 3D data. To address this issue, we propose SE3D: a framework for Saliency method Evaluation in 3D imaging. We propose modifications to ShapeNet, ScanNet, and BraTS datasets, and evaluation metrics to assess saliency methods for 3D CNNs. We evaluate both state-of-the-art saliency methods designed for 3D data and extensions of popular 2D saliency methods to 3D. Our experiments show that 3D saliency methods do not provide explanations of sufficient quality, and that there is margin for future improvements and safer applications of 3D CNNs in critical fields.
Perception Visualization: Seeing Through the Eyes of a DNN
Apr 21, 2022

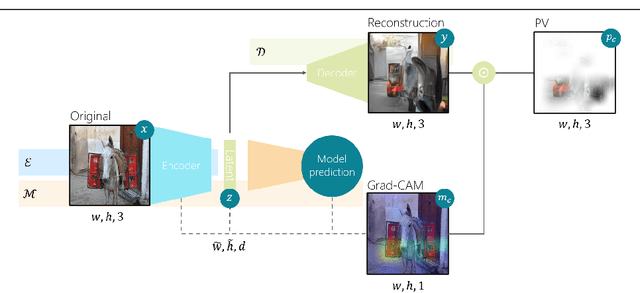
Artificial intelligence (AI) systems power the world we live in. Deep neural networks (DNNs) are able to solve tasks in an ever-expanding landscape of scenarios, but our eagerness to apply these powerful models leads us to focus on their performance and deprioritises our ability to understand them. Current research in the field of explainable AI tries to bridge this gap by developing various perturbation or gradient-based explanation techniques. For images, these techniques fail to fully capture and convey the semantic information needed to elucidate why the model makes the predictions it does. In this work, we develop a new form of explanation that is radically different in nature from current explanation methods, such as Grad-CAM. Perception visualization provides a visual representation of what the DNN perceives in the input image by depicting what visual patterns the latent representation corresponds to. Visualizations are obtained through a reconstruction model that inverts the encoded features, such that the parameters and predictions of the original models are not modified. Results of our user study demonstrate that humans can better understand and predict the system's decisions when perception visualizations are available, thus easing the debugging and deployment of deep models as trusted systems.
Adversarial Scratches: Deployable Attacks to CNN Classifiers
Apr 20, 2022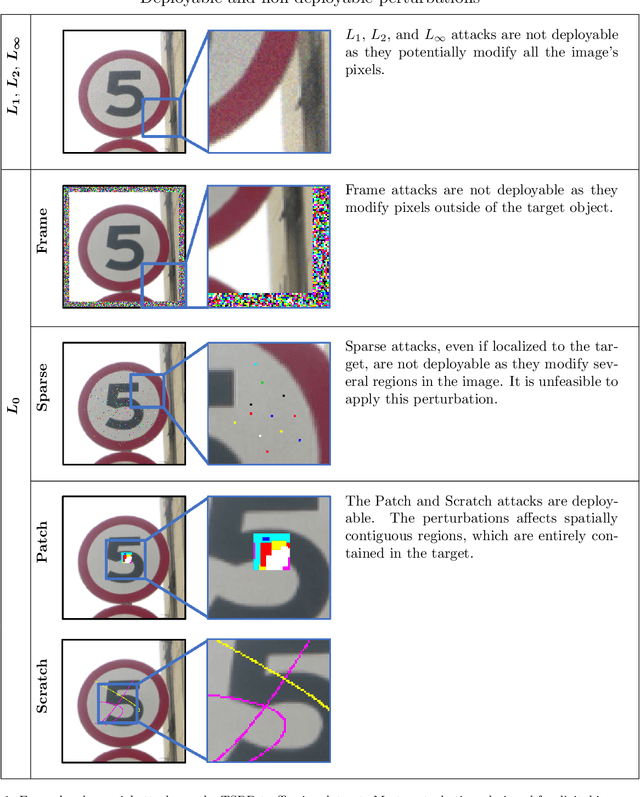
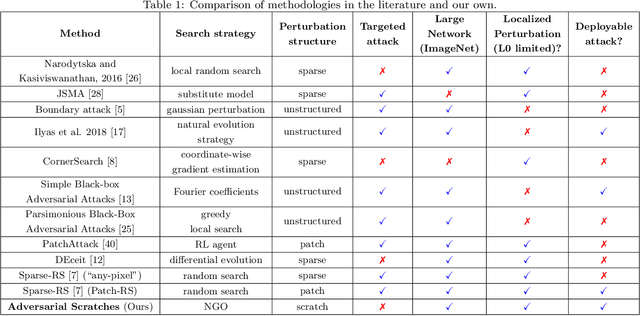
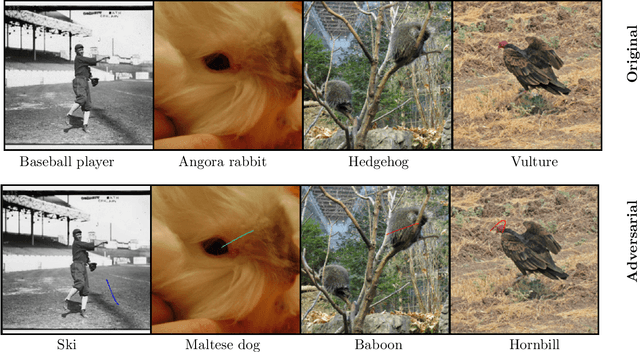
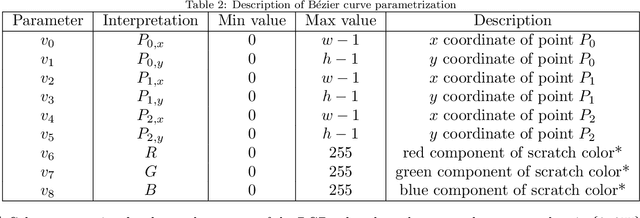
A growing body of work has shown that deep neural networks are susceptible to adversarial examples. These take the form of small perturbations applied to the model's input which lead to incorrect predictions. Unfortunately, most literature focuses on visually imperceivable perturbations to be applied to digital images that often are, by design, impossible to be deployed to physical targets. We present Adversarial Scratches: a novel L0 black-box attack, which takes the form of scratches in images, and which possesses much greater deployability than other state-of-the-art attacks. Adversarial Scratches leverage B\'ezier Curves to reduce the dimension of the search space and possibly constrain the attack to a specific location. We test Adversarial Scratches in several scenarios, including a publicly available API and images of traffic signs. Results show that, often, our attack achieves higher fooling rate than other deployable state-of-the-art methods, while requiring significantly fewer queries and modifying very few pixels.