 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Bayesian Approach to Online Planning
Jun 04, 2024


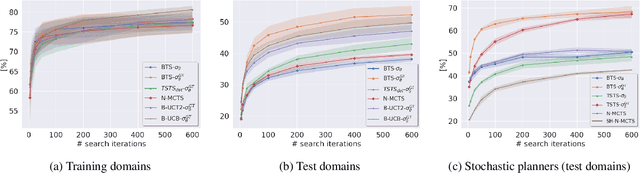
The combination of Monte Carlo tree search and neural networks has revolutionized online planning. As neural network approximations are often imperfect, we ask whether uncertainty estimates about the network outputs could be used to improve planning. We develop a Bayesian planning approach that facilitates such uncertainty quantification, inspired by classical ideas from the meta-reasoning literature. We propose a Thompson sampling based algorithm for searching the tree of possible actions, for which we prove the first (to our knowledge) finite time Bayesian regret bound, and propose an efficient implementation for a restricted family of posterior distributions. In addition we propose a variant of the Bayes-UCB method applied to trees. Empirically, we demonstrate that on the ProcGen Maze and Leaper environments, when the uncertainty estimates are accurate but the neural network output is inaccurate, our Bayesian approach searches the tree much more effectively. In addition, we investigate whether popular uncertainty estimation methods are accurate enough to yield significant gains in planning. Our code is available at: https://github.com/nirgreshler/bayesian-online-planning.
Evaluating and Calibrating Uncertainty Prediction in Regression Tasks
May 30, 2019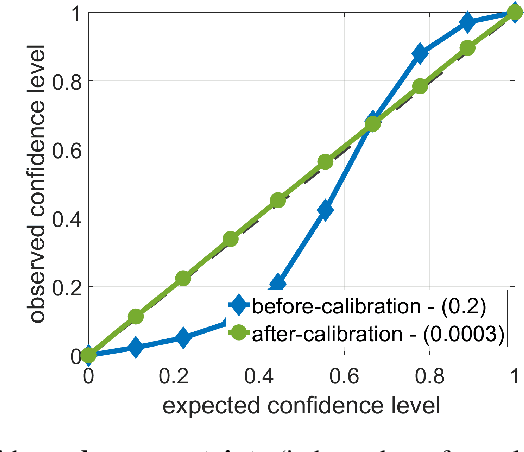
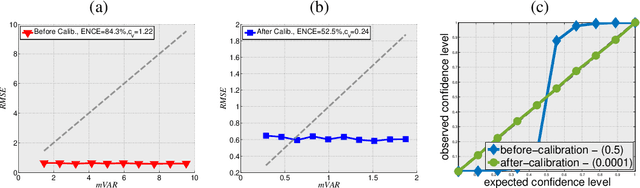
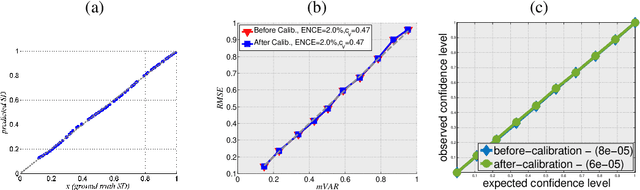

Predicting not only the target but also an accurate measure of uncertainty is important for many applications and in particular safety-critical ones. In this work we study the calibration of uncertainty prediction for regression tasks which often arise in real-world systems. We show that the existing approach for evaluating the calibration of a regression uncertainty [Kuleshov et al. 2018] has severe limitations in distinguishing informative from non-informative uncertainty predictions. We propose a new evaluation method that escapes this caveat using a simple histogram-based approach inspired by reliability diagrams used in classification tasks. Our method clusters examples with similar uncertainty prediction and compares the prediction with the empirical uncertainty on these examples. We also propose a simple scaling-based calibration that preforms well in our experimental tests. We show results on both a synthetic, controlled problem and on the object detection bounding-box regression task using the COCO and KITTI datasets.
Closing the gap towards end-to-end autonomous vehicle system
Jan 04, 2019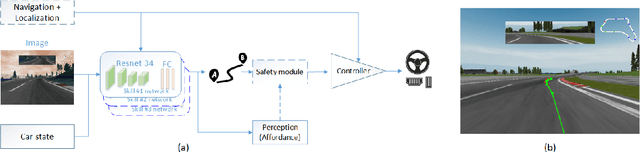
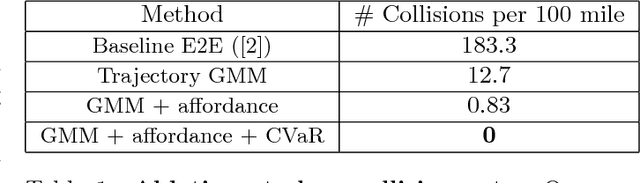
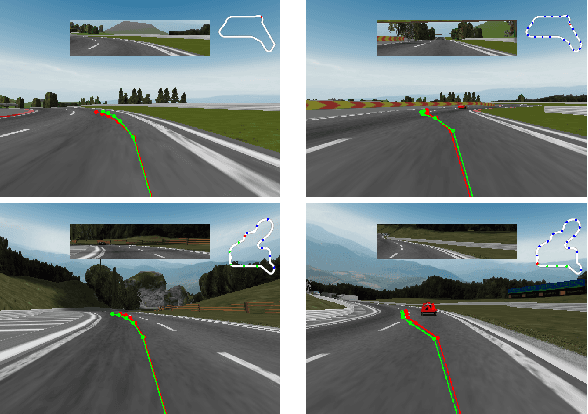
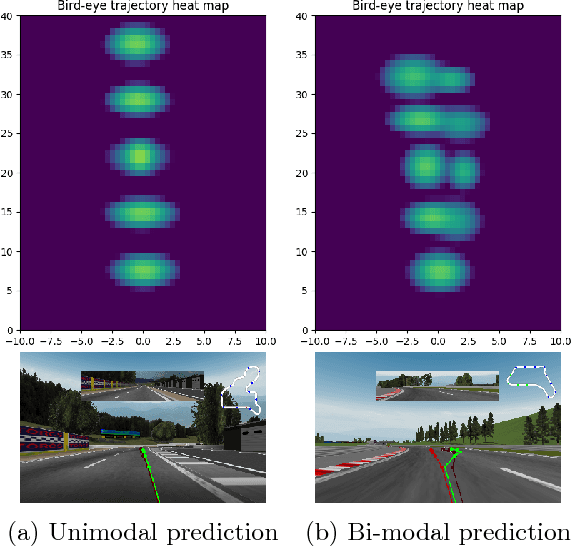
Designing a driving policy for autonomous vehicles is a difficult task. Recent studies suggested an end-toend (E2E) training of a policy to predict car actuators directly from raw sensory inputs. It is appealing due to the ease of labeled data collection and since handcrafted features are avoided. Explicit drawbacks such as interpretability, safety enforcement and learning efficiency limit the practical application of the approach. In this paper, we amend the basic E2E architecture to address these shortcomings, while retaining the power of end-to-end learning. A key element in our proposed architecture is formulation of the learning problem as learning of trajectory. We also apply a Gaussian mixture model loss to contend with multi-modal data, and adopt a finance risk measure, conditional value at risk, to emphasize rare events. We analyze the effect of each concept and present driving performance in a highway scenario in the TORCS simulator. Video is available in this link: https://www.youtube.com/watch?v=1JYNBZNOe_4