 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeZero-Shot Detection of LLM-Generated Code via Approximated Task Conditioning
Jun 06, 2025Detecting Large Language Model (LLM)-generated code is a growing challenge with implications for security, intellectual property, and academic integrity. We investigate the role of conditional probability distributions in improving zero-shot LLM-generated code detection, when considering both the code and the corresponding task prompt that generated it. Our key insight is that when evaluating the probability distribution of code tokens using an LLM, there is little difference between LLM-generated and human-written code. However, conditioning on the task reveals notable differences. This contrasts with natural language text, where differences exist even in the unconditional distributions. Leveraging this, we propose a novel zero-shot detection approach that approximates the original task used to generate a given code snippet and then evaluates token-level entropy under the approximated task conditioning (ATC). We further provide a mathematical intuition, contextualizing our method relative to previous approaches. ATC requires neither access to the generator LLM nor the original task prompts, making it practical for real-world applications. To the best of our knowledge, it achieves state-of-the-art results across benchmarks and generalizes across programming languages, including Python, CPP, and Java. Our findings highlight the importance of task-level conditioning for LLM-generated code detection. The supplementary materials and code are available at https://github.com/maorash/ATC, including the dataset gathering implementation, to foster further research in this area.
A New Dataset and Methodology for Malicious URL Classification
Dec 31, 2024Malicious URL (Uniform Resource Locator) classification is a pivotal aspect of Cybersecurity, offering defense against web-based threats. Despite deep learning's promise in this area, its advancement is hindered by two main challenges: the scarcity of comprehensive, open-source datasets and the limitations of existing models, which either lack real-time capabilities or exhibit suboptimal performance. In order to address these gaps, we introduce a novel, multi-class dataset for malicious URL classification, distinguishing between benign, phishing and malicious URLs, named DeepURLBench. The data has been rigorously cleansed and structured, providing a superior alternative to existing datasets. Notably, the multi-class approach enhances the performance of deep learning models, as compared to a standard binary classification approach. Additionally, we propose improvements to string-based URL classifiers, applying these enhancements to URLNet. Key among these is the integration of DNS-derived features, which enrich the model's capabilities and lead to notable performance gains while preserving real-time runtime efficiency-achieving an effective balance for cybersecurity applications.
Closing the gap towards end-to-end autonomous vehicle system
Jan 04, 2019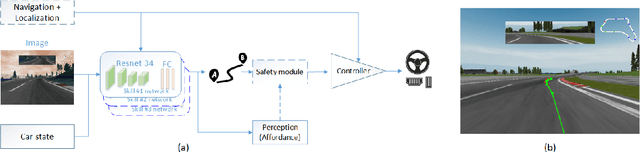
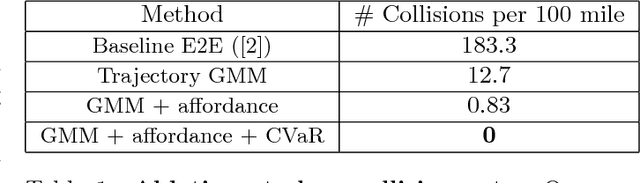
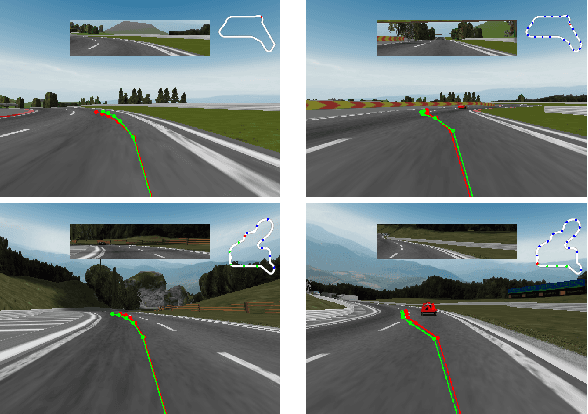
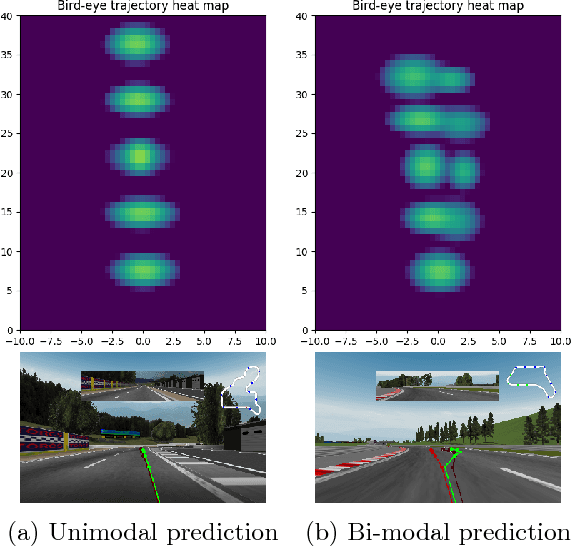
Designing a driving policy for autonomous vehicles is a difficult task. Recent studies suggested an end-toend (E2E) training of a policy to predict car actuators directly from raw sensory inputs. It is appealing due to the ease of labeled data collection and since handcrafted features are avoided. Explicit drawbacks such as interpretability, safety enforcement and learning efficiency limit the practical application of the approach. In this paper, we amend the basic E2E architecture to address these shortcomings, while retaining the power of end-to-end learning. A key element in our proposed architecture is formulation of the learning problem as learning of trajectory. We also apply a Gaussian mixture model loss to contend with multi-modal data, and adopt a finance risk measure, conditional value at risk, to emphasize rare events. We analyze the effect of each concept and present driving performance in a highway scenario in the TORCS simulator. Video is available in this link: https://www.youtube.com/watch?v=1JYNBZNOe_4