 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMastering Diverse, Unknown, and Cluttered Tracks for Robust Vision-Based Drone Racing
Dec 11, 2025Most reinforcement learning(RL)-based methods for drone racing target fixed, obstacle-free tracks, leaving the generalization to unknown, cluttered environments largely unaddressed. This challenge stems from the need to balance racing speed and collision avoidance, limited feasible space causing policy exploration trapped in local optima during training, and perceptual ambiguity between gates and obstacles in depth maps-especially when gate positions are only coarsely specified. To overcome these issues, we propose a two-phase learning framework: an initial soft-collision training phase that preserves policy exploration for high-speed flight, followed by a hard-collision refinement phase that enforces robust obstacle avoidance. An adaptive, noise-augmented curriculum with an asymmetric actor-critic architecture gradually shifts the policy's reliance from privileged gate-state information to depth-based visual input. We further impose Lipschitz constraints and integrate a track-primitive generator to enhance motion stability and cross-environment generalization. We evaluate our framework through extensive simulation and ablation studies, and validate it in real-world experiments on a computationally constrained quadrotor. The system achieves agile flight while remaining robust to gate-position errors, developing a generalizable drone racing framework with the capability to operate in diverse, partially unknown and cluttered environments. https://yufengsjtu.github.io/MasterRacing.github.io/
Mapless Collision-Free Flight via MPC using Dual KD-Trees in Cluttered Environments
Mar 13, 2025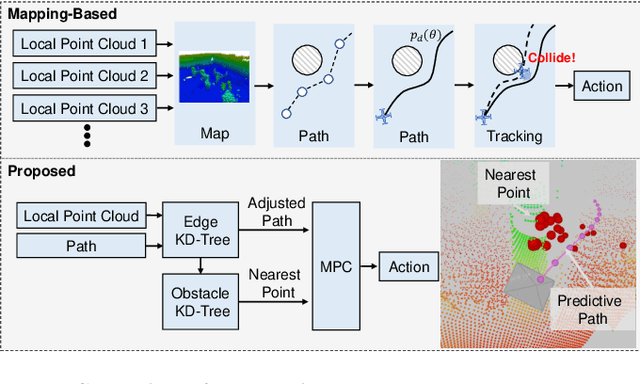
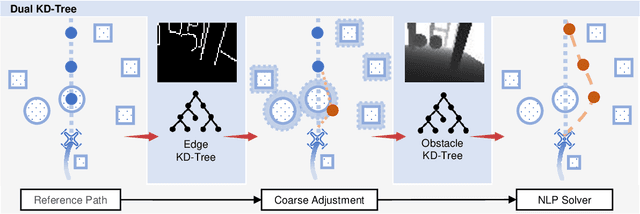
Collision-free flight in cluttered environments is a critical capability for autonomous quadrotors. Traditional methods often rely on detailed 3D map construction, trajectory generation, and tracking. However, this cascade pipeline can introduce accumulated errors and computational delays, limiting flight agility and safety. In this paper, we propose a novel method for enabling collision-free flight in cluttered environments without explicitly constructing 3D maps or generating and tracking collision-free trajectories. Instead, we leverage Model Predictive Control (MPC) to directly produce safe actions from sparse waypoints and point clouds from a depth camera. These sparse waypoints are dynamically adjusted online based on nearby obstacles detected from point clouds. To achieve this, we introduce a dual KD-Tree mechanism: the Obstacle KD-Tree quickly identifies the nearest obstacle for avoidance, while the Edge KD-Tree provides a robust initial guess for the MPC solver, preventing it from getting stuck in local minima during obstacle avoidance. We validate our approach through extensive simulations and real-world experiments. The results show that our approach significantly outperforms the mapping-based methods and is also superior to imitation learning-based methods, demonstrating reliable obstacle avoidance at up to 12 m/s in simulations and 6 m/s in real-world tests. Our method provides a simple and robust alternative to existing methods.
Seeing Through Pixel Motion: Learning Obstacle Avoidance from Optical Flow with One Camera
Nov 07, 2024



Optical flow captures the motion of pixels in an image sequence over time, providing information about movement, depth, and environmental structure. Flying insects utilize this information to navigate and avoid obstacles, allowing them to execute highly agile maneuvers even in complex environments. Despite its potential, autonomous flying robots have yet to fully leverage this motion information to achieve comparable levels of agility and robustness. Challenges of control from optical flow include extracting accurate optical flow at high speeds, handling noisy estimation, and ensuring robust performance in complex environments. To address these challenges, we propose a novel end-to-end system for quadrotor obstacle avoidance using monocular optical flow. We develop an efficient differentiable simulator coupled with a simplified quadrotor model, allowing our policy to be trained directly through first-order gradient optimization. Additionally, we introduce a central flow attention mechanism and an action-guided active sensing strategy that enhances the policy's focus on task-relevant optical flow observations to enable more responsive decision-making during flight. Our system is validated both in simulation and the real world using an FPV racing drone. Despite being trained in a simple environment in simulation, our system is validated both in simulation and the real world using an FPV racing drone. Despite being trained in a simple environment in simulation, our system demonstrates agile and robust flight in various unknown, cluttered environments in the real world at speeds of up to 6m/s.