 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-agent In-context Coordination via Decentralized Memory Retrieval
Nov 13, 2025



Large transformer models, trained on diverse datasets, have demonstrated impressive few-shot performance on previously unseen tasks without requiring parameter updates. This capability has also been explored in Reinforcement Learning (RL), where agents interact with the environment to retrieve context and maximize cumulative rewards, showcasing strong adaptability in complex settings. However, in cooperative Multi-Agent Reinforcement Learning (MARL), where agents must coordinate toward a shared goal, decentralized policy deployment can lead to mismatches in task alignment and reward assignment, limiting the efficiency of policy adaptation. To address this challenge, we introduce Multi-agent In-context Coordination via Decentralized Memory Retrieval (MAICC), a novel approach designed to enhance coordination by fast adaptation. Our method involves training a centralized embedding model to capture fine-grained trajectory representations, followed by decentralized models that approximate the centralized one to obtain team-level task information. Based on the learned embeddings, relevant trajectories are retrieved as context, which, combined with the agents' current sub-trajectories, inform decision-making. During decentralized execution, we introduce a novel memory mechanism that effectively balances test-time online data with offline memory. Based on the constructed memory, we propose a hybrid utility score that incorporates both individual- and team-level returns, ensuring credit assignment across agents. Extensive experiments on cooperative MARL benchmarks, including Level-Based Foraging (LBF) and SMAC (v1/v2), show that MAICC enables faster adaptation to unseen tasks compared to existing methods. Code is available at https://github.com/LAMDA-RL/MAICC.
Efficient Human-AI Coordination via Preparatory Language-based Convention
Nov 01, 2023



Developing intelligent agents capable of seamless coordination with humans is a critical step towards achieving artificial general intelligence. Existing methods for human-AI coordination typically train an agent to coordinate with a diverse set of policies or with human models fitted from real human data. However, the massively diverse styles of human behavior present obstacles for AI systems with constrained capacity, while high quality human data may not be readily available in real-world scenarios. In this study, we observe that prior to coordination, humans engage in communication to establish conventions that specify individual roles and actions, making their coordination proceed in an orderly manner. Building upon this observation, we propose employing the large language model (LLM) to develop an action plan (or equivalently, a convention) that effectively guides both human and AI. By inputting task requirements, human preferences, the number of agents, and other pertinent information into the LLM, it can generate a comprehensive convention that facilitates a clear understanding of tasks and responsibilities for all parties involved. Furthermore, we demonstrate that decomposing the convention formulation problem into sub-problems with multiple new sessions being sequentially employed and human feedback, will yield a more efficient coordination convention. Experimental evaluations conducted in the Overcooked-AI environment, utilizing a human proxy model, highlight the superior performance of our proposed method compared to existing learning-based approaches. When coordinating with real humans, our method achieves better alignment with human preferences and an average performance improvement of 15% compared to the state-of-the-art.
Robust Multi-agent Communication via Multi-view Message Certification
May 07, 2023
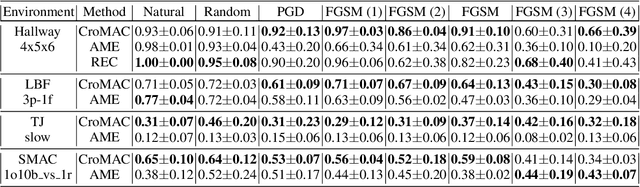


Many multi-agent scenarios require message sharing among agents to promote coordination, hastening the robustness of multi-agent communication when policies are deployed in a message perturbation environment. Major relevant works tackle this issue under specific assumptions, like a limited number of message channels would sustain perturbations, limiting the efficiency in complex scenarios. In this paper, we take a further step addressing this issue by learning a robust multi-agent communication policy via multi-view message certification, dubbed CroMAC. Agents trained under CroMAC can obtain guaranteed lower bounds on state-action values to identify and choose the optimal action under a worst-case deviation when the received messages are perturbed. Concretely, we first model multi-agent communication as a multi-view problem, where every message stands for a view of the state. Then we extract a certificated joint message representation by a multi-view variational autoencoder (MVAE) that uses a product-of-experts inference network. For the optimization phase, we do perturbations in the latent space of the state for a certificate guarantee. Then the learned joint message representation is used to approximate the certificated state representation during training. Extensive experiments in several cooperative multi-agent benchmarks validate the effectiveness of the proposed CroMAC.
Multi-agent Continual Coordination via Progressive Task Contextualization
May 07, 2023Cooperative Multi-agent Reinforcement Learning (MARL) has attracted significant attention and played the potential for many real-world applications. Previous arts mainly focus on facilitating the coordination ability from different aspects (e.g., non-stationarity, credit assignment) in single-task or multi-task scenarios, ignoring the stream of tasks that appear in a continual manner. This ignorance makes the continual coordination an unexplored territory, neither in problem formulation nor efficient algorithms designed. Towards tackling the mentioned issue, this paper proposes an approach Multi-Agent Continual Coordination via Progressive Task Contextualization, dubbed MACPro. The key point lies in obtaining a factorized policy, using shared feature extraction layers but separated independent task heads, each specializing in a specific class of tasks. The task heads can be progressively expanded based on the learned task contextualization. Moreover, to cater to the popular CTDE paradigm in MARL, each agent learns to predict and adopt the most relevant policy head based on local information in a decentralized manner. We show in multiple multi-agent benchmarks that existing continual learning methods fail, while MACPro is able to achieve close-to-optimal performance. More results also disclose the effectiveness of MACPro from multiple aspects like high generalization ability.