 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Image-Guided Robotic System for Transcranial Magnetic Stimulation: System Development and Experimental Evaluation
Oct 20, 2024



Transcranial magnetic stimulation (TMS) is a noninvasive medical procedure that can modulate brain activity, and it is widely used in neuroscience and neurology research. Compared to manual operators, robots may improve the outcome of TMS due to their superior accuracy and repeatability. However, there has not been a widely accepted standard protocol for performing robotic TMS using fine-segmented brain images, resulting in arbitrary planned angles with respect to the true boundaries of the modulated cortex. Given that the recent study in TMS simulation suggests a noticeable difference in outcomes when using different anatomical details, cortical shape should play a more significant role in deciding the optimal TMS coil pose. In this work, we introduce an image-guided robotic system for TMS that focuses on (1) establishing standardized planning methods and heuristics to define a reference (true zero) for the coil poses and (2) solving the issue that the manual coil placement requires expert hand-eye coordination which often leading to low repeatability of the experiments. To validate the design of our robotic system, a phantom study and a preliminary human subject study were performed. Our results show that the robotic method can half the positional error and improve the rotational accuracy by up to two orders of magnitude. The accuracy is proven to be repeatable because the standard deviation of multiple trials is lowered by an order of magnitude. The improved actuation accuracy successfully translates to the TMS application, with a higher and more stable induced voltage in magnetic field sensors.
On the Fly Robotic-Assisted Medical Instrument Planning and Execution Using Mixed Reality
Apr 08, 2024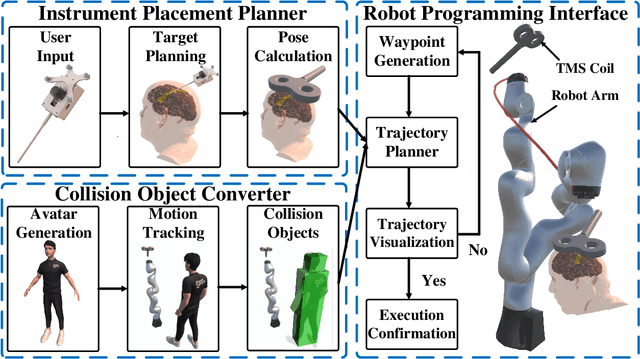
Robotic-assisted medical systems (RAMS) have gained significant attention for their advantages in alleviating surgeons' fatigue and improving patients' outcomes. These systems comprise a range of human-computer interactions, including medical scene monitoring, anatomical target planning, and robot manipulation. However, despite its versatility and effectiveness, RAMS demands expertise in robotics, leading to a high learning cost for the operator. In this work, we introduce a novel framework using mixed reality technologies to ease the use of RAMS. The proposed framework achieves real-time planning and execution of medical instruments by providing 3D anatomical image overlay, human-robot collision detection, and robot programming interface. These features, integrated with an easy-to-use calibration method for head-mounted display, improve the effectiveness of human-robot interactions. To assess the feasibility of the framework, two medical applications are presented in this work: 1) coil placement during transcranial magnetic stimulation and 2) drill and injector device positioning during femoroplasty. Results from these use cases demonstrate its potential to extend to a wider range of medical scenarios.