 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn the Fly Robotic-Assisted Medical Instrument Planning and Execution Using Mixed Reality
Paper and Code
Apr 08, 2024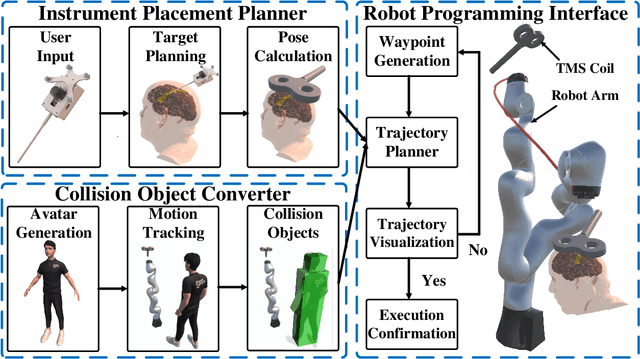
Robotic-assisted medical systems (RAMS) have gained significant attention for their advantages in alleviating surgeons' fatigue and improving patients' outcomes. These systems comprise a range of human-computer interactions, including medical scene monitoring, anatomical target planning, and robot manipulation. However, despite its versatility and effectiveness, RAMS demands expertise in robotics, leading to a high learning cost for the operator. In this work, we introduce a novel framework using mixed reality technologies to ease the use of RAMS. The proposed framework achieves real-time planning and execution of medical instruments by providing 3D anatomical image overlay, human-robot collision detection, and robot programming interface. These features, integrated with an easy-to-use calibration method for head-mounted display, improve the effectiveness of human-robot interactions. To assess the feasibility of the framework, two medical applications are presented in this work: 1) coil placement during transcranial magnetic stimulation and 2) drill and injector device positioning during femoroplasty. Results from these use cases demonstrate its potential to extend to a wider range of medical scenarios.