 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCross-Learning from Scarce Data via Multi-Task Constrained Optimization
Nov 17, 2025A learning task, understood as the problem of fitting a parametric model from supervised data, fundamentally requires the dataset to be large enough to be representative of the underlying distribution of the source. When data is limited, the learned models fail generalize to cases not seen during training. This paper introduces a multi-task \emph{cross-learning} framework to overcome data scarcity by jointly estimating \emph{deterministic} parameters across multiple, related tasks. We formulate this joint estimation as a constrained optimization problem, where the constraints dictate the resulting similarity between the parameters of the different models, allowing the estimated parameters to differ across tasks while still combining information from multiple data sources. This framework enables knowledge transfer from tasks with abundant data to those with scarce data, leading to more accurate and reliable parameter estimates, providing a solution for scenarios where parameter inference from limited data is critical. We provide theoretical guarantees in a controlled framework with Gaussian data, and show the efficiency of our cross-learning method in applications with real data including image classification and propagation of infectious diseases.
Convolutional Filtering with RKHS Algebras
Nov 02, 2024



In this paper, we develop a generalized theory of convolutional signal processing and neural networks for Reproducing Kernel Hilbert Spaces (RKHS). Leveraging the theory of algebraic signal processing (ASP), we show that any RKHS allows the formal definition of multiple algebraic convolutional models. We show that any RKHS induces algebras whose elements determine convolutional operators acting on RKHS elements. This approach allows us to achieve scalable filtering and learning as a byproduct of the convolutional model, and simultaneously take advantage of the well-known benefits of processing information in an RKHS. To emphasize the generality and usefulness of our approach, we show how algebraic RKHS can be used to define convolutional signal models on groups, graphons, and traditional Euclidean signal spaces. Furthermore, using algebraic RKHS models, we build convolutional networks, formally defining the notion of pointwise nonlinearities and deriving explicit expressions for the training. Such derivations are obtained in terms of the algebraic representation of the RKHS. We present a set of numerical experiments on real data in which wireless coverage is predicted from measurements captured by unmaned aerial vehicles. This particular real-life scenario emphasizes the benefits of the convolutional RKHS models in neural networks compared to fully connected and standard convolutional operators.
Multi-agent assignment via state augmented reinforcement learning
Jun 03, 2024
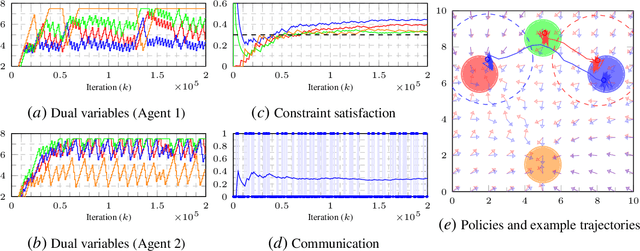
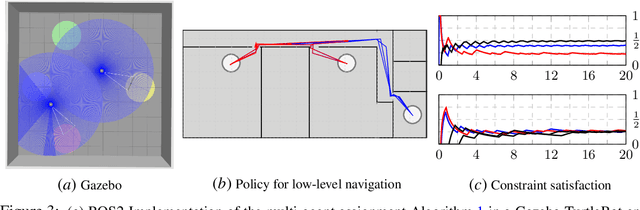
We address the conflicting requirements of a multi-agent assignment problem through constrained reinforcement learning, emphasizing the inadequacy of standard regularization techniques for this purpose. Instead, we recur to a state augmentation approach in which the oscillation of dual variables is exploited by agents to alternate between tasks. In addition, we coordinate the actions of the multiple agents acting on their local states through these multipliers, which are gossiped through a communication network, eliminating the need to access other agent states. By these means, we propose a distributed multi-agent assignment protocol with theoretical feasibility guarantees that we corroborate in a monitoring numerical experiment.
* 12 pages, 3 figures, 6th Annual Conference on Learning for Dynamics and Control
A Networked Multi-Agent System for Mobile Wireless Infrastructure on Demand
Jun 14, 2023



Despite the prevalence of wireless connectivity in urban areas around the globe, there remain numerous and diverse situations where connectivity is insufficient or unavailable. To address this, we introduce mobile wireless infrastructure on demand, a system of UAVs that can be rapidly deployed to establish an ad-hoc wireless network. This network has the capability of reconfiguring itself dynamically to satisfy and maintain the required quality of communication. The system optimizes the positions of the UAVs and the routing of data flows throughout the network to achieve this quality of service (QoS). By these means, task agents using the network simply request a desired QoS, and the system adapts accordingly while allowing them to move freely. We have validated this system both in simulation and in real-world experiments. The results demonstrate that our system effectively offers mobile wireless infrastructure on demand, extending the operational range of task agents and supporting complex mobility patterns, all while ensuring connectivity and being resilient to agent failures.